Aquabots: zelfstandig in en onder water
De voormalige scheepswerf RDM Rotterdam is vandaag de dag een grote speelplaats voor bedrijven en onderwijs. Een van de onderzoeksprojecten waar de studenten en docenten zich in het Innovation Dock op de Campus van RDM Rotterdam mee bezighouden, is het project aquabots van RDM Centre of Expertise (RDM CoE, onderdeel van Hogeschool Rotterdam).
En dan hebben we het niet over de speelgoed robotvisjes, die in de vorm van een haai, maanvis of zeepaardje een aquarium opvrolijken. De aquabots waar het in dit geval om gaat, zijn kleine, gerobotiseerde, emissievrije, autonome scheepjes, met een romplengte van maximaal twee meter én, nog het meest complexe onderdeel van allemaal, aquabots die ónder water kunnen opereren.
Uitdaging
Wilco Braam, Hoofddocent Onderzoek & Innovatie bij het Instituut EAS en regisseur bij het RDM CoE aan de Hogeschool Rotterdam, vertelt: “Het project aquabots komt voort uit een challenge voor de studenten. Ze werden uitgedaagd een vaartuig te ontwikkelen dat zelfstandig de Maas over kan steken. De aquadrones moesten uiteindelijk dus ‘Maaswaardig’ worden.”
De uitdaging was opgebouwd uit drie stappen: als eerste moest de aquadrone zelfstandig kunnen varen in het bassin (20 x 10 x 0,70 m) binnen in het ‘Innovation Dock’ op de Campus. Vervolgens gingen ze varen in het zogenaamde buitenlab. Dat buitenlab is de Dronehaven, een afgesloten experimenteerlocatie voor aquadrones in open water. De Dronehaven is in 2016 als onderdeel van de Dokhaven in Rotterdam geopend. Uiteindelijk hebben alle tests en ontwikkelingen geleid tot twee Maaswaardige drones: de EindMaas en de Aftica.
Toepassingen
Aquadrones zijn inzetbaar voor allerlei toepassingen, zoals waterkwaliteitsmetingen, het verwijderen van plasticresten uit het water, dieptemetingen, kade-inspecties en camera-inspecties van bijvoorbeeld scheepsrompen. Op en onder water. Sinds juni 2017 kunnen de bootjes die in het overdekte bassin op de Campus varen, ook rechtstreeks vanaf de 20 jaar oude scheepsbrug, die in het Innovation Dock staat, worden aangestuurd. Peter Verheijen, bij het RDM CoE de ‘regisseur Maritiem en Offshore’ laat ons de brug vol trots zien.


“We hebben deze oude brug van een onderzeeboot gekregen, toen die geen dienst meer deed. De studenten hebben hem hier zelf compleet gerevitaliseerd, inclusief nieuwe besturing en bijbehorende software.” In het bassin varen intussen diverse aquabots driftig door elkaar heen en mogen we testen hoe wendbaar ze blijken.
Water- en drukbestendigheid
Het maken van een aquadrone lijkt misschien eenvoudig, maar de schijn bedriegt. Want water is een vijandige omgeving voor robots. Er is natuurlijk het risico van kortsluiting en corrosie, maar water laat ook geen radiogolven door. Communiceren en navigeren onder water zijn hierom een flinke uitdaging. De best toepasbare en toegankelijke technieken daarvoor zijn sonar en piëzo-technologie.
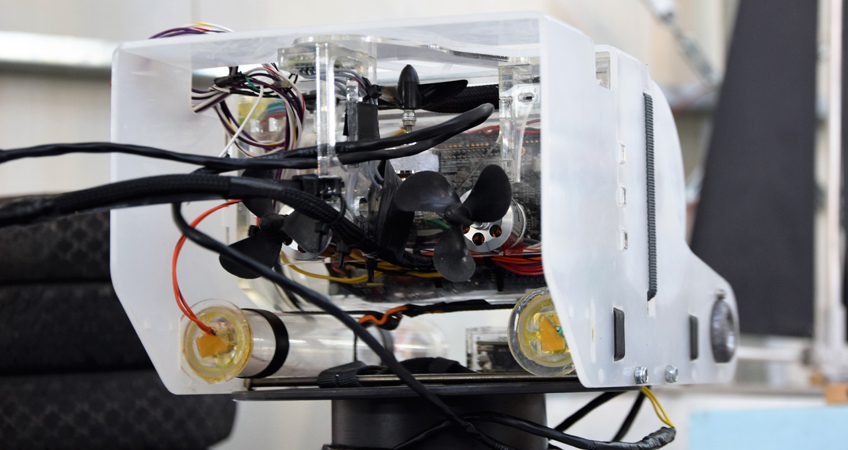
Leon van Soest, hbo-student werktuigbouwkunde, laat ons in het bassin de besturing van een aquabot zien voor onderwatergebruik.

“De grootste uitdaging bij de vervaardiging van deze aquabots is de hoge druk die erop staat. Dan hebben we het over 10 à 11 Bar. Alles moet dus extreem water- en drukbestendig zijn,” legt hij uit. “Aquabots zijn aan alle zijden voorzien van zogenaamde thrusters,” gaat Leon verder. “Dat zijn op afstand bestuurbare schroeven die zorgen voor een grote wendbaarheid en stabiliteit van de drone. Ook zorgen de thrusters voor de dynamische positionering, die nodig is om de stroming te kunnen weerstaan. Om goed te kunnen sensoren moet je namelijk de negen dimensies van bewegen kunnen controleren.” Een van de ontwikkelingen waar op dit moment hard aan wordt gewerkt, is contactloze aandrijving met behulp van magnetische overbrengingen. Dan is er weer een zorg minder als het gaat om lekkagegevoelige punten.
Aquabots worden gezien als een ontwikkelingsplatform voor onbemand varen. De toepassing van robots en autonome vaartuigen, uitgerust met sensoren, is een belangrijke ontwikkeling voor de maritieme sector.
Door: Walter Kooren
Meer nieuws
Flexibele backstop kan helpen bij aanpak netcongestie

(productnews)
Energie / 19-11-2024
Lees meerNieuwe techniek maakt 3D-printen (LPBF) flexibeler en efficiënter
(productnews)
Algemeen / 18-11-2024
Lees meerInvest-NL: ‘Nederland kan wereldleider worden in Lab-on-Chip technologie’
(productnews)
Algemeen / 18-11-2024
Lees meerGroen netwerken
