Golfbeweging drijft autonoom onderwater-voertuig aan
Alhoewel autonome onderwatervoertuigen (AUV’s) elektrisch worden aangedreven, worden ze meestal ‘gelanceerd’ vanaf schepen die traditioneel brandstof verbruiken. Momenteel wordt een systeem ontwikkeld waarbij dergelijke steunpunten worden vervangen door milieuvriendelijkere, door golven aangedreven, AUV-punten die zich onder water zullen gaan bevinden.
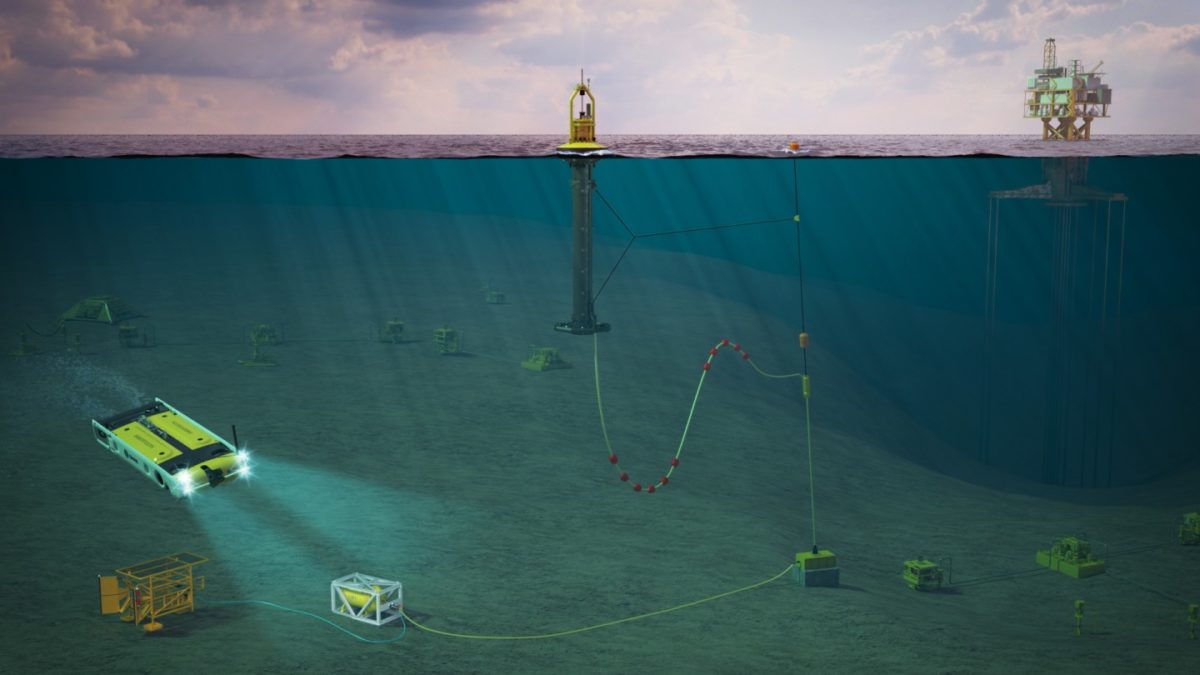
Deze AUV-punten staan officieel bekend als Subsea Vehicle Residency Solution: een zee-boei van Ocean Power Technologies verankerd aan de zeebodem en drijvend aan het oppervlak. Hieronder bevindt zich een zuigeraandrijving die door de op en neergaande beweging van de golven elektriciteit genereert.
Bij het nieuwe systeem loopt een onderzeese kabel vanaf de boei naar beneden en levert stroom- en communicatiegegevens aan een op de zeebodem geplaatste batterij en/of dockingstation die geleverd wordt door het Britse bedrijf Modus Seabed Intervention.
Het autonome onderwatervoertuig van Saab Seaeye Sabertooth vindt autonoom zijn weg van en naar bijvoorbeeld verspreid gelegen boorplatforms. Na daar gegevens te hebben opgehaald, laadt het bij het AUV-punt zijn batterijen weer op en verzendt en ontvangt het gegevens (via de boei) van en naar de op de wal zijnde gebruikers.
Uiteindelijk zou de technologie gebruikt kunnen worden voor een groot aantal toepassingen. Daarbij kan worden gedachte aan remote-milieumonitoring, regelmatige inspectie van onderzeese apparatuur en communicatie met apparatuur en systemen die op de zeebodem staan opgesteld. Het concept is door de partnerbedrijven voorgedragen voor verdere ontwikkeling bij de Amerikaanse overheid.
Verwacht wordt dat het systeem aanzienlijke milieu-, risico-, veiligheids- en kostenvoordelen zal bieden ten opzichte van oplossingen op basis van fossiele brandstof aandrijving. Vernieuwend is het feit dat dit systeem volledig autonoom is. Daardoor hoeft personeel niet meer de zee op en wordt de veiligheid verhoogd.
Meer nieuws
Flexibele backstop kan helpen bij aanpak netcongestie

(productnews)
Energie / 19-11-2024
Lees meerNieuwe techniek maakt 3D-printen (LPBF) flexibeler en efficiënter
(productnews)
Algemeen / 18-11-2024
Lees meerInvest-NL: ‘Nederland kan wereldleider worden in Lab-on-Chip technologie’
(productnews)
Algemeen / 18-11-2024
Lees meerGroen netwerken
