Het lukt Nederlandse bedrijven nog altijd niet om hun facturen binnen de afgesproken betaaltermijn te betalen. Slechts...
Het lukt Nederlandse bedrijven nog altijd niet om hun facturen binnen de afgesproken betaaltermijn te betalen. Slechts ongeveer de helft van de bedrijven geeft aan vrijwel alle facturen (80 tot 100%)...
Een van de meest opwindende mogelijkheden van 3D-geprinte architectuur is dat het een revolutie teweeg kan brengen op het...
Een van de meest opwindende mogelijkheden van 3D-geprinte architectuur is dat het een revolutie teweeg kan brengen op het gebied van betaalbare huisvesting. Het Portugese Havelar laat zien dat dit...
UltiMaker lanceert de UltiMaker Factor 4, een 3D-printer gericht op licht industriële toepassingen. Denk daarbij aan de...
UltiMaker lanceert de UltiMaker Factor 4, een 3D-printer gericht op licht industriële toepassingen. Denk daarbij aan de ontwikkeling en productie van proceskritische tools en componenten. Het nieuwe...
Een nieuwe drone van het Bionic Learning Network is in staat met een groot aantal van zijn soortgenoten autonoom in een...
Een nieuwe drone van het Bionic Learning Network is in staat met een groot aantal van zijn soortgenoten autonoom in een zwerm te vliegen. Daarbij is het mogelijk de volledige...
De Europese Commissie (EC) start een onderzoek naar de toegang van Europese spelers op het gebied van medische apparatuur...
De Europese Commissie (EC) start een onderzoek naar de toegang van Europese spelers op het gebied van medische apparatuur tot de Chinese markt. Daarbij wordt onderzocht in hoeverre China hierbij...
Het Chinese Deep Robotics deelt een video van een nieuwe robot. Net als Spot van Boston Dynamics komt de robot altijd weer...
Het Chinese Deep Robotics deelt een video van een nieuwe robot. Net als Spot van Boston Dynamics komt de robot altijd weer op zijn pootjes terecht, ongeacht de val die...
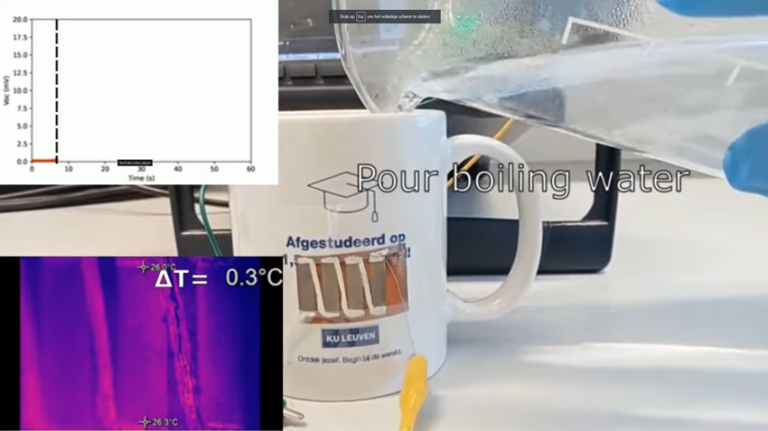
Zogeheten thermo-elektrische generatoren zetten omgevingswarmte om in elektriciteit. Ze kunnen worden gebruikt om stroom te...
Zogeheten thermo-elektrische generatoren zetten omgevingswarmte om in elektriciteit. Ze kunnen worden gebruikt om stroom te leveren aan een breed gamma van toepassingen. Van draagbare toestellen en...
De interesse in elektrisch rijden neemt af. Diverse factoren maken Nederlanders terughoudender met de overstap op elektrisch...
De interesse in elektrisch rijden neemt af. Diverse factoren maken Nederlanders terughoudender met de overstap op elektrisch rijden. Denk hierbij aan de relatieve hoge aanschafprijs van elektrische...