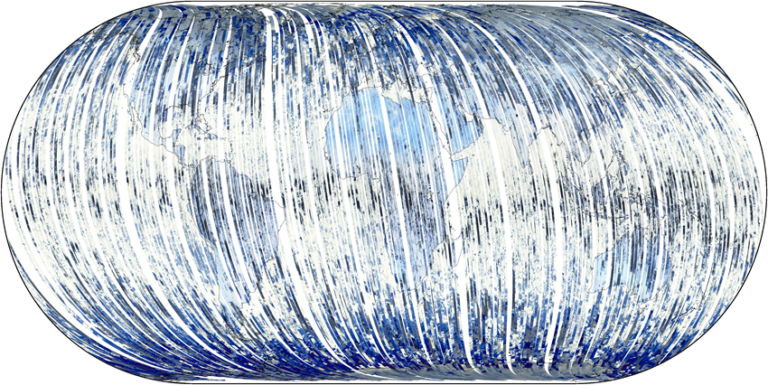
NASA’s klimaatsatelliet PACE, met aan boord het Nederlandse instrument SPEXone, heeft de mijlpaal van First Light bereikt....
NASA’s klimaatsatelliet PACE, met aan boord het Nederlandse instrument SPEXone, heeft de mijlpaal van First Light bereikt. Daarmee heeft de wereld nu toegang tot satellietbeelden die type en...
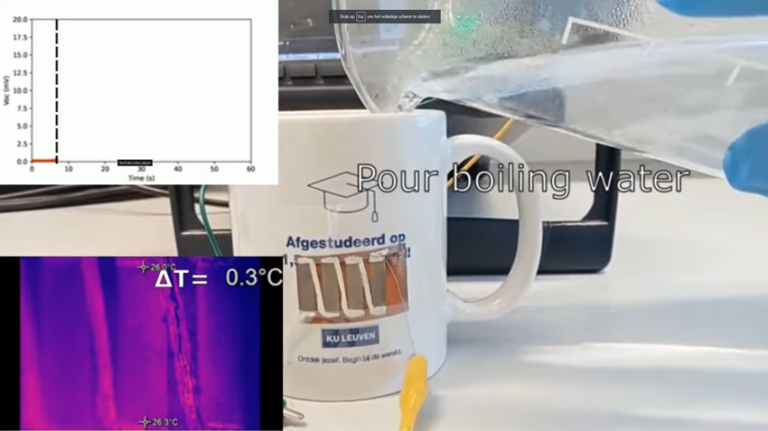
De opeenhoping van grote onderkoelde waterdruppels op vliegtuigen kan een uitdaging vormen voor de vluchtuitvoering....
De opeenhoping van grote onderkoelde waterdruppels op vliegtuigen kan een uitdaging vormen voor de vluchtuitvoering. IJsvorming als gevolg van supergekoelde grote druppels (Supercooled Large...
Hyundai Motors en KIA introduceert een vernieuwde versie DAL-e Delivery, een robot gericht op het afleveren van producten,...
Hyundai Motors en KIA introduceert een vernieuwde versie DAL-e Delivery, een robot gericht op het afleveren van producten, goederen en objecten in binnenomgevingen. De robot is onder meer voorzien...
Industriële grootverbruikers van elektriciteit zijn in Nederland fors duurder uit dan in buurlanden. Zij betalen in...
Industriële grootverbruikers van elektriciteit zijn in Nederland fors duurder uit dan in buurlanden. Zij betalen in Nederland tot 66% meer voor elektriciteit dan in België, Duitsland en Frankrijk....
Elektrische voertuigen (EV’s) zijn niet voor iedereen geschikt, stelt Stellantis-topman Carlos Tavares. Waar...
Elektrische voertuigen (EV’s) zijn niet voor iedereen geschikt, stelt Stellantis-topman Carlos Tavares. Waar EV’s in sommige regio’s uitkomst bieden, zijn de huidige generatie...
Het demissionaire kabinet (1,7 miljard) en de regio Eindhoven (bijna 800 miljoen) hebben besloten om in totaal 2,5 miljard...
Het demissionaire kabinet (1,7 miljard) en de regio Eindhoven (bijna 800 miljoen) hebben besloten om in totaal 2,5 miljard te investeren met als doel de versterking van de chipsector in...
Het Australische architectenbureau Koichi Takada Architects kreeg de opdracht om een nieuwe hoogbouw te ontwerpen in South...
Het Australische architectenbureau Koichi Takada Architects kreeg de opdracht om een nieuwe hoogbouw te ontwerpen in South Brisbane. Het bureau heeft de inheemse cultuur van het land omarmt met een...
Oru Kayak staat bekend als leverancier van compacte, draagbare vaartuigen. Sinds kort biedt het bedrijf hiervoor een even...
Oru Kayak staat bekend als leverancier van compacte, draagbare vaartuigen. Sinds kort biedt het bedrijf hiervoor een even compact, draagbaar elektrisch aandrijfsysteem. In samenwerking met Bixpy...