
Nieuw systeem maakt op afstand aansturen van autonome voertuigen mogelijk
Een nieuw systeem ontwikkeld door een Amerikaanse startup geeft menselijke bestuurders de mogelijkheid op afstand de controle over een zelfrijdend voertuig over te nemen. Dit maakt het mogelijk in te grijpen indien de werking van de voertuigen wordt verstoord of autonome voertuigen in zeer lastige situaties terecht komen. Het systeem kan hiermee de ontwikkeling en ingebruikname van autonome voertuigen versnellen.
Autonome voertuigen zijn steeds beter in staat veilig over de weg te navigeren. Net als mensen kunnen zij echter met onverwachte, onoverzichtelijke en/of afwijkende situaties te maken krijgen. Denk hierbij aan wegwerkzaamheden waarbij de reguliere wegmarkeringen ontbreken en rijbanen smaller dan gebruikelijk zijn, maar ook aan verkeersregelaars die met handgebaren instructies geven. Ook sommige weersomstandigheden kunnen autonome navigatie bemoeilijken.
Besturing overnemen
Een systeem ontwikkeld door Designated Driver, een startup uit de Amerikaanse staat Oregon, kan uitkomst bieden. Het gaat om een ’teleoperations systeem’: een systeem waarmee een menselijke bestuurder de besturing over een autonoom voertuig handmatig kan overnemen. Dit maakt het onder meer mogelijk in te grijpen in onduidelijke situaties waarin een autonoom voertuig zelf de weg niet kan vinden, maar ook om de besturing over te nemen indien de werking van het voertuig wordt verstoord door bijvoorbeeld een technische storing.
Het systeem kan worden geïntegreerd in nieuwe én bestaande autonome voertuigen. De oplossing bestaat uit drie componenten:
- De Driver Station hardware and software kit: deze kit bevat alle componenten die bestuurders nodig hebben om een autonoom voertuig op afstand aan te sturen. Denk hierbij aan een zestal beeldschermen, een stuur, gas- en rempedaal, en de bijbehorende software.
- De in-vehicle hardware and software kit: deze kit wordt in het autonome voertuig ingebouwd en bevat alle componenten die nodig zijn om dit voertuig aan te sturen. Deze kit kan worden geïntegreerd in verschillende soorten voertuigen en is dus niet gekoppeld aan bijvoorbeeld een specifiek merk.
- Menselijke bestuurders: de voertuigen worden bestuurd door menselijke bestuurders, die met behulp van de Driver Station hardware and software kit de voertuigen aansturen. Deze bestuurders kunnen optioneel door Designated Driver als dienst worden geleverd.

Vergelijkbare systemen
Belangrijk om op te merken is dat Designated Driver niet de enige partij is die werkt aan systemen waarmee autonome voertuigen op afstand kunnen worden bestuurd. Zo maakte het Researchlab Automated Driving Delft (RADD), gevestigd op de campus van de TU Delft, vorig jaar bekend dat zij hun autonome Renault Twizy op afstand kunnen besturen.
Ook het Amerikaanse Phantom Auto werkt aan een dergelijk systeem. Deze oplossing bestaat – net als de oplossing van Designated Driver – uit drie componenten:
- software die het mogelijk maakt met voertuigen te communiceren
- een API die wordt ingezet voor real-time ondersteuning en besturing
- menselijke bestuurders die als onderdeel van een dienst kunnen worden geleverd door Phantom Auto
Wettelijk verplicht
De mogelijkheid de besturing over autonome voertuigen op afstand over te nemen kan niet alleen helpen de ontwikkeling en inzet van dergelijke auto’s te versnellen, maar is in sommige gevallen ook verplicht. Zo werd in Nederland in 2018 in Nederland de Experimenteerwet zelfrijdende auto’s aangenomen door de Tweede Kamer. Deze wet maakt het mogelijk autonome voertuigen op de Nederlandse openbare weg te testen, zonder dat een een menselijke bestuurder in het voertuig aanwezig is. Een voorwaarde hiervoor is wel dat het voertuig wordt gemonitord door een mens, die te allen tijde op afstand moet kunnen ingrijpen.
Auteur: Wouter Hoeffnagel
Bron: Designated Driver (foto’s)
Bron: Phantom Auto
Bron: RADD
Meer dan 80 fabrikanten ontwikkelen printprofielen voor het Ultimaker Material Alliance Programma
Meer dan 80 fabrikanten wereldwijd zijn nu actief in het ontwikkelen van materiaalprintprofielen voor FFF 3D-printen. Ultimaker heeft dit recentelijk bekend gemaakt. Ultimaker lanceerde het Material Alliance programma in april 2018 om tegemoet te komen aan de groeiende vraag naar 3D-printmaterialen voor industriële toepassingen.
Een jaar na het starten van het Ultimaker Material Alliance Programma maakt een grote groep van toonaangevende materiaalfabrikanten, waaronder BASF, DSM, DuPont, Owens Corning, Arkema, Jabil, Lehmann&Voss&Co., actief gebruik van de Print Profile Assistant. Deze is door Ultimaker beschikbaar gesteld om hen te helpen sneller een breed scala aan krachtige materialen voor 3D-printen op basis van filamenten naar de professionele markt te brengen. Deze materiaalprintprofielen kunnen worden gedownload via de marktplaats in Ultimaker Cloud.
De materiaalkeuze is een van de belangrijkste aandachtspunten voor technici tijdens de selectie van een productiemethode. De open materiaalstrategie van Ultimaker stelt hen in staat om voor het 3D-printen gebruik te maken van een keur aan materialen met specifieke eigenschappen, zoals hittebestendigheid, schokbestendigheid, chemische weerstand, flexibiliteit en robuustheid.
“We hebben ons sinds de introductie op een overweldigende belangstelling voor het Ultimaker Material Alliance Program mogen verheugen. In slechts twaalf maanden tijd hebben we met diverse multinationals samengewerkt om nieuwe toepassingen mogelijk te maken. Daarmee hebben we fantastische resultaten geboekt”, zegt Paul Heiden, senior vice president Product Management bij Ultimaker. “Zo kunnen professionele gebruikers er nu voor kiezen om gebruik te maken van een filament dat met metaal is gevuld en hetzelfde esthetische effect bewerkstelligt als een duurder metaalsysteem. Een ander voordeel van het programma is dat gebruikers nu een materiaal kunnen selecteren dat veilig is voor elektrostatische ontlading. Technici en ontwerpers in de elektronica-industrie kunnen daarmee optimaal profiteren van de voordelen van desktop 3D-printen.”

Noninvasief implantaat laat patiënten met verlamming typen
Een nieuw implantaat stelt patiënten met een verlamming in staat met behulp van hun gedachten onder meer te typen. Het gaat om een minimaal invasief implantaat, die via de halsslagader wordt ingebracht. Op korte termijn worden de eerste klinische testen met het implantaat uitgevoerd.
De Stentrode is ontwikkeld door Synchron, een Amerikaans bedrijf gevestigd in Palo Alto. Al langer zijn hersenimplantaten beschikbaar die het mogelijk maken met behulp van gedachten tekst te typen. Een voorbeeld is de Nederlandse Hanneke de Bruijne, die als gevolg van de progressieve zenuwziekte ALS vrijwel geheel verlamd is. In 2016 werd bekend dat De Bruijne met behulp van een hersenimplantaat een tablet kan bedienen en woorden kan spellen.
Dergelijke implantaten moet doorgaans via een hersenoperatie worden geïmplanteerd. Niet alleen is dit een zware operatie met een lange hersteltijd, ook kunnen ook allerlei complicaties opleveren.
Endovasculaire neurale interface
Met de Stentrode wil Synchron deze nadelen wegnemen. Deze ‘endovasculaire neurale interface’ wordt via de halsslagader met behulp van een katheter geïmplanteerd. Het implantaat wordt hierbij naar de motorische cortex geleid en in een nabijgelegen slagader geplaatst. De Stentrode is in feite een stent met ingebouwde sensoren, die zich in het bloedvat uitvouwt en aan de vaatwand hecht. Na verloop van tijd groeien cellen over de stent, waardoor deze langzaam wordt opgenomen door het menselijk lichaam.
Door deze werkwijze hoeft de patiënt geen hersenoperatie te ondergaan. Dit helpt niet alleen risico’s verbonden aan een hersenoperatie uit te sluiten, maar zorgt ook dat patiënten een minder zware ingreep hoeven te ondergaan.
Signalen opvangen en doorsturen
Eenmaal geïmplanteerd in de motorische cortex vangt de Stentrode signalen op, die worden doorgezet naar een draadloze antenne die in de borstkast van de patiënt is geïmplanteerd. Via deze antenne worden de signalen verstuurd naar een externe receiver. Synchron werkt momenteel aan een softwaresuite die het mogelijk maakt behulp van deze signalen een besturingssysteem en een reeks applicaties met ondersteunende functionaliteiten aan te sturen.
Synchron heeft hoge verwachtingen van Stentrode. “Deze technologie heeft de potentie patiënten met een verlamming de digitale controle over hun wereld terug te geven, zonder dat zij hiervoor hun spieren hoeven bewegen”, schrijft het bedrijf op zijn website. Thomas Oxley, CEO en oprichter van Synchron, zegt tegenover Futurism ernaar te streven signalen uit de motorische cortex om te zetten naar tekst met een snelheid die vergelijkbaar is met het schrijven van een sms-bericht.
Klinische test
Op dit moment bereidt Synchron de eerste klinische test met Stentrode voor. Hierbij wordt de interface geïmplanteerd bij vijf proefpersonen, die ieder een verlamming aan de handen of mond hebben die hen belemmerd te communiceren.
Auteur: Wouter Hoeffnagel
Bron: Synchron
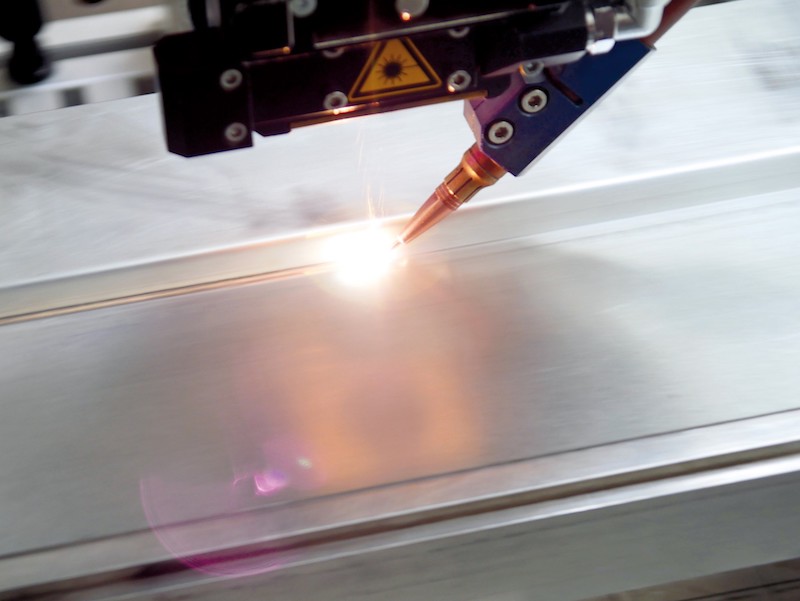
Multispot-optiek maakt laser-solderen en -lassen van moeilijke materialen mogelijk
Laserline introduceert een multispot-optiek voor laser-solderen en -lassen. De optiek maakt het mogelijk moeilijk verwerkbare materialen te solderen of lassen. Het bedrijf zet DC-servomotoren van FAULHABER in om de energie van de verschillende spots correct te verdelen.
Solderen biedt in de automotive industrie verschillende voordelen ten opzichte van lassen. Zo worden metaalplaten bij lassen langs de lasnaad tot smelttemperatuur verhit, waarna deze platen direct met elkaar worden verbonden. Dit vereist een hoge mate van precisie, terwijl het niet mogelijk is lassen van zichtkwaliteit te realiseren. Daarnaast zijn gelaste naden ruw en door verdamping van zink poreus.
Solderen levert voordelen op
Indien gekozen wordt voor solderen worden metaalplaten echter niet direct met elkaar verbonden, maar wordt een koper-siliciumsoldeersel als vulmateriaal tussen deze platen geplaatst. Dit materiaal wordt tijdens het solderen vloeibaar en stolt vervolgens weer. Hierdoor worden niet alleen de delen samengevoegd, maar ook de tussenruimte opgevuld. Solderen maakt hierdoor ten opzichte van lassen een hogere dimensionale tolerantie mogelijk, terwijl het vastklemmen van werkstukken minder inspanning vereist. Door solderen kunnen spleetvrije verbindingen met zichtkwaliteit worden gemaakt, zodat de gesoldeerde componenten zonder verdere bewerking direct kunnen worden geverfd.
Niet ieder materiaal is echter even geschikt om te solderen. Zo gedraagt het soldeersel zich anders bij thermisch verzinkte metaalplaten. “Op de oppervlakken naast de naad was er een verhoogd aantal spatten van vloeibaar soldeersel. Met name microspatten kwamen voor. Die zijn aanvankelijk moeilijk te zien, maar worden na het schilderen duidelijk zichtbaar,” legt Dr. Axel Luft, Automotive Sales Manager bij Laserline, uit. “Ook de kwaliteit van de naad zelf was verslechterd. Die was ruwer en vormde vaak zogenaamde golfjes, met andere woorden punten waarop het soldeersel de geplande naadgrens overschrijdt.”
Thermische verzinking
De problemen worden veroorzaakt door de zinklaag op de metalen plaat. De thermische verzinking zorgt dat deze laag dikker en minder regelmatig wordt, terwijl het materiaal ook een ander reflectiegedrag vertoond. Thorge Hammer, als ingenieur bij Volkswagen in Wolfburg verantwoordelijk voor dit laserproces, kwam met een oplossing. Door het zink te verwijderen van de randen van de naad voordat het soldeerproces begint, kunnen de problemen worden uitgebannen.
Dit betekent in theorie dat de doorgaans cirkelvormige laserspot voor laser-solderen rechthoekig zou moeten worden gemaakt. De voorste hoeken van deze spot kunnen dan worden ingezet om het zink te verwijderen, terwijl de rest van de rechthoek wordt ingezet voor het daadwerkelijke solderen. Dit was technisch gezien echter niet mogelijk. Daarom is een alternatief verzonnen.
Dr. Markus Baumann, chief development engineer bij Laserline: “In plaats van een spot te vormen met een complexe – en dus optisch zeer moeilijke – vorm, hebben we uiteindelijk twee kleinere spots aan de hoofdspot toegevoegd. Bij het solderen worden deze kleine spots altijd gericht op de randen van de naad enkele vierkante millimeters voor de hoofdspot uit.” Deze spots worden gecreëerd door de laserstraal te splitsen in een drietal stralen: een zogenaamde homogenisatiestraal genereert een vierkante hoofdspot, terwijl twee andere optische elementen de straal splitsen om extra spots te genereren. Deze spots worden uitgelijnd met behulp van een optische module.
Spatvrij
De kleinere spots leveren voldoende energie om de zinklaag te verdampen, het staal te smelten en een lichte oxidatie te genereren. De zogenaamde ‘passieve laag’ die hierdoor ontstaat voorkomt dat het vloeibare soldeersel over de rand heengaat, zodat geen spatten ontstaan.
Het eindresultaat is gesoldeerde delen die geen spatten bevatten en geen verdere bewerking nodig hebben om geverfd te kunnen worden. Een bijkomend voordeel is de gelijkmatigere verdeling van warmte over het soldeersel dan bij zijn cirkelvormige tegenhanger, wat bijdraagt aan een rustiger soldeerbad. “Met deze technologie konden we eindelijk alle problemen oplossen die we tegenkwamen met thermisch verzinkte metaalplaten”, licht Dr. Luft toe. “Het wordt nu gebruikt in de serieproductie bij Volkswagen. En het stelt ons in staat om een soldeersnelheid tot 4,5 meter per minuut te bereiken. Andere fabrikanten zullen spoedig volgen.”
Laservermogen instellen
In het geval van laser-solderen worden twee spots voor en naast de hoofdspot gegenereerd. Om een rechte naad te realiseren, moet de krachtverdeling tussen zowel de hoofd- en vooropgaande spots als tussen de vooropgaande spots onderling nauwkeurig worden ingesteld. De wijze waarop het laservermogen over de spots wordt verdeeld is afhankelijk van de positie van de optische elementen. Door deze elementen over de x- en y-as te verplaatsen is het mogelijk de exacte verdeling van het laservermogen af te stemmen op specifieke taken.
Zo kan om bijvoorbeeld aluminium te lassen een intensieve kleine spot in de zwakkere grote spot worden geplaatst. Indien metaalplaten van verschillende diktes aan elkaar gelast moeten worden, kunnen deze spots worden aangepast aan het materiaal. Dit kan gedurende het lasproces zelf, aangezien de elementen in de Laserline optische modules met behulp van motoren worden bewogen.

Compacte motoren
Deze optische modules zijn vierkant, met randen van 12 centimeter en een diepte van 5 centimeter. In deze beperkte ruimte zijn de optische elementen ondergebracht, evenals een verfijnd mechanisch systeem. Dit betekende dat er weinig ruimte overbleef voor de motoren. De afmetingen van de motoren hebben dan ook een belangrijke rol gespeeld in de keuze.
“Wij hebben gekozen voor borstelloze DC-servomotoren uit de 1226 B FAULHABER serie met een diameter van 12 millimeter, met direct op de motoras aangebrachte geleideschroeven en zonder askoppeling”, legt Dr. Baumann uit. “Hierdoor hebben we een zeer compacte aandrijving, die toch betrouwbaar het benodigde vermogen en toerental levert. Makkelijke integratie van de motorregelaar in het systeem was een andere belangrijke overweging.”
RS232 of CAN-bus
De Motion Controller van FAULHABER is buiten de module gepositioneerd, waarbij de communicatie via een RS232 seriële interface verloopt. De RS232-controller kan worden vervangen door een uitvoering met CANopen-interface, wat het mogelijk maakt de motor en controller via een CAN-bussysteem aan te sturen.
De laseroptiek wordt op een robotarm gemonteerd, die de optiek in de gewenste positie brengt. De optiek moet dan ook bestand zijn tegen aanzienlijke dynamische belastingen die op de motoren inwerken, wat ongewenste positieveranderingen kan veroorzaken. “Dit is geen probleem voor de FAULHABER-motor, omdat deze met de geïntegreerde Hall-sensor de actuele positie detecteert en indien nodig bijstelt – uiterlijk wanneer de laser op de naad wordt geplaatst”, stelt Dr. Luft. Onjuiste positionering is volgens hem uitgesloten, terwijl de motoren consistent reproduceerbare resultaten opleveren.
Auteur: Wouter Hoeffnagel
Bron: Faulhaber
Artsen en hoogleraren: 'IBM Watson kan belofte niet waarmaken'
IBM Watson beloofde met zijn kunstmatige intelligentie (AI) Watson de medische sector te veranderen. Het bedrijf heeft echter te hoog ingezet en kan zijn beloftes niet waarmaken.
Deze kritiek uitten verschillende artsen en hoogleraren tegenover IEEE Spectrum. IBM Watson werd in 2014 geïntroduceerd. Tijdens een presentatie wist Watson een reeks symptomen van een patiënt te analyseren en op basis hiervan een aantal mogelijke diagnoses te geven. Bij elk van deze diagnoses werd een zekerheidspercentage gegeven en ter onderbouwing verwezen naar ondersteunende medische bronnen.
Succesvolle en minder succesvolle resultaten
In de jaren die hierop volgden werd Watson verder ontwikkeld, waarbij successen werden geboekt. Zo maakten onderzoekers van IBM Research in juli 2017 bekend erin te zijn geslaagd genoomdata met behulp van IBM Watson 960 keer sneller te analyseren. Het handmatig analyseren van een gemiddelde genoomtest neemt zo’n 160 manuren in beslag, terwijl Watson dit proces in slechts tien minuten wist uit te voeren. Dit zonder in te leveren op kwaliteit.
Andere projecten waren echter minder succesvol. Zo ging het Memorial Sloan Kettering Cancer Center in 2012 een samenwerking met IBM aan om Watson te trainen in het diagnostiseren en behandelen van kankerpatiënten. De AI leverde in dit project niet het gewenste resultaat op. Zo wist de website STAT de hand te leggen op documenten van IBM waaruit blijkt dat Watson regelmatig foutieve adviezen gaf en niet aan de verwachtingen voldeed. Als voorbeeld wordt een proef omschreven waarin een kankerpatiënt met een hevige bloeding door Watson medicatie kreeg voorgeschreven die deze bloeding zou verergeren. IBM benadrukt dat het ging om een test op basis van fictieve informatie in plaats van echte patiëntgegevens.
Een tweede project dat geen succes werd is een samenwerking met het MD Anderson Cancer Center. Dit ziekenhuis investeerde 62 miljoen dollar in een project rond Watson, dat later werd geannuleerd. Watson zou niet voldoen aan de eisen van een functioneel product.
Kritisch
Verschillende artsen en hoogleraren staan kritisch tegenover Watson en stellen dat de AI zijn beloftes niet heeft weten waar te maken. Watson zou in de praktijk vooral als een AI-assistent functioneren en geschikt zijn om bepaalde routinematige taken uit te voeren. “Wat betreft reputatie zitten zij denk ik in de problemen”, zegt Robert Wachter, bestuursvoorzitter van de medische divisie van de Universiteit van Californië tegen IEEE Spectrum. Wachter wijst erop dat IBM het eerste bedrijf is dat fors investeert in de implementatie van AI in de zorg. Dit levert uitdagingen op, waar IBM als koploper als eerste mee wordt geconfronteerd.
Herbert Chase, hoogleraar Medische Wetenschappen en Biomedische Informatica van de Columbia University, was betrokken bij de initiële ontwikkeling van Watson. “Artsen – zeker zij die aan de frontlinie staan, de eerstelijns zorg – gaan iedere dag aan het werk met de wetenschap dat zij onmogelijk alles kunnen weten wat zij nodig hebben om de beste, meest efficiënte en meest effectieve zorg te kunnen leveren”, aldus Chase. De hoogleraar zag in Watson potentie als een tool om klinische besluitvorming te ondersteunen en artsen te helpen betere zorg te leveren.
Chase, die sinds 2014 niet meer betrokken is bij de ontwikkeling van Watson, zegt echter teleurgesteld te zijn in de langzame ontwikkeling van Watson op het gebied van zorg. “Ik ben niet op de hoogte van spectaculaire homeruns”, aldus de hoogleraar.
‘IBM loopt niet voorop’
Ook Eliot Siegel, een hoogleraar radiologische en bestuursvoorzitter voor informatiesystemen bij de Universiteit van Maryland, is betrokken geweest bij de ontwikkeling van Watson. Ook Siegel is kritisch. De hoogleraar stelt dat AI-gebaseerde tools binnen een decennium van onschatbare waarde zullen zijn voor artsen. Hij is echter niet overtuigd dat deze tools door IBM ontwikkeld zullen worden. “Ik denk niet dat zij vooroplopen met AI”, aldus Siegel. “De meest spannende dingen gebeuren bij Google, Apple en Amazon.”
Het volledige artikel is te vinden bij IEEE Spectrum.
Auteur: Wouter Hoeffnagel
Bron: IEEE Spectrum
Bron: IBM Research

Volkswagen test autonoom rijden level 4 in Hamburg
Volkswagen voert in het Duitse Hamburg een proef uit met autonoom rijden op level 4. Op een traject van drie kilometer worden een vijftal autonome e-Golf's getest.
De project wordt uitgevoerd door Volkswagen Research Group, die hiermee Level 4 autonoom rijden in praktijkomstandigheden wil testen. Voor de test zijn een vijftal e-Golf’s, elektrische varianten van de Volkswagen Golf, voorzien van laserscanners, camera’s, ultrasonische sensoren en radarsystemen. Volkswagen hoopt van de resultaten van de test te kunnen profiteren in andere onderzoeksprojecten van de Volkswagen Research Group.
Level 0 tot en met 5
Level 4 is het op één na hoogste niveau van een zelfrijdende auto’s. Kenniscentrum CROW hanteert voor deze niveau’s de volgende definities:
- Level 0 – geen automatisering: De bestuurder voert alle rijtaken uit, maar kan hierbij worden ondersteund door waarschuwingssystemen of systemen die ingrijpen in de rijtaak, zoals adaptieve cruise control.
- Level 1 – ondersteuning van bestuurder: Een systeem neemt de operationele rijtaken deels over, zoals sturen, remmen en versnellen. Alle overige dynamische rijtaken komen voor rekening van de bestuurder.
- Level 2 – gedeeltelijke automatisering: Een systeem neemt alle operationele rijtaken zoals sturen, remmen en versnellen over van de bestuurder. Daarnaast worden tactische rijtaken in beperkte mate overgenomen van de bestuurder. De bestuurder is bij dit niveau dus nog steeds nauw betrokken bij het besturen van het voertuig.
- Level 3 – voorwaardelijke automatisering: Een systeem neemt alle operationele rijtaken en een deel van de tactische en strategische rijtaken van de bestuurder over. Indien nodig moet de bestuurder de controle over het systeem direct kunnen overnemen.
- Level 4 – hoog geautomatiseerd: Een systeem neemt alle operationele taken en een deel van de tactische en strategische rijtaken van de bestuurder over. De bestuurder kan bij dit niveau zijn aandacht op andere zaken richten, aangezien het systeem er niet vanuit gaat dat een bestuurder te allen tijde adequaat zal reageren om de controle over het voertuig over te nemen.
- Level 5 – volledig geautomatiseerd: Een systeem neemt alle operationele rijtaken, alle tactische rijtaken en een deel van de strategische rijtaken over van de bestuurder. Dit niveau is geschikt voor alle denkbare weg- en omgevingssituaties, wat ondermeer betekent dat de bestuurder onder alle weersomstandigheden de besturing over kan dragen aan het systeem.
Testtraject
Op dit moment is een testtraject van drie kilometer beschikbaar voor de autonome e-Golf’s. Daarnaast is een testtraject van 9 kilometer voor autonome en connected voertuigen in Hamburg in de maak, dat in 2020 gereed moet zijn. Op het traject worden onder meer de verkeerslichten voorzien van componenten die communicatie van en naar voertuigen mogelijk maakt. Via het traject wordt gelijktijdig informatie verzameld om de verkeersdoorstroming te optimaliseren met behulp van digitalisering.
De e-Golf’s die voor de test worden ingezet zijn voorzien van elf laserscanners, zeven radars en veertien camera’s. Gedurende reguliere testritten – die al snel enkele uren in beslag nemen – wordt per minuut tot vijf gigabyte aan data verstuurd. Deze data wordt lokaal verwerkt met behulp van een computersysteem dat in de kofferbak van het voertuig is geplaatst. Dit systeem heeft volgens Volkswagen evenveel rekenkracht als ongeveer vijftien laptops.
Tijdens de testritten worden de e-Golf’s bestuurd door speciaal getrainde testchauffeurs. Deze chauffeurs monitoren de rijfuncties van de voertuigen en grijpen indien nodig in om ongelukken te voorkomen en de veiligheid te garanderen.
Digitaal ecosysteem
“De testen zijn gericht op de technische mogelijkheden en eisen aan stedelijke infrastructuur. Om rijden in toekomstige voertuigen nog veiliger en comfortabeler te maken moeten voertuigen niet alleen autonoom en intelligent worden, maar moeten steden ook een digitaal ecosysteem leveren dat voertuigen in staat stelt te communiceren met verkeerslichten, verkeersbeheersystemen en elkaar”, legt Axel Heinricht, Hoofd van de Volkswagen Research Group, uit.
“Over tweeënhalf jaar host Hamburg het World Congress for Intelligent Transport Systems (ITS). Geautomatiseerd rijden zal een sleutelrol spelen. Ik ben verheugd dat onze strategische partner Volkswagen nu al de eerste gebruiker van ons digitale testplatform wordt. We willen van Hamburg een modelstad maken voor intelligente mobiliteit en in 2021 verschillende innovatieve mobiliteitsprojecten aan het wereldwijde publiek presenteren”, zegt Michael Westhagemann, senator voor Economie, Transport en Innovatie.
Aurora Innovation
Volkswagen werkt op het gebied van autonoom rijden samen met Aurora Innovation, een Amerikaans bedrijf dat technologie ontwikkeld voor zelfrijdende voertuigen. Volkswagen wil met behulp van de technologie van Aurora de ontwikkeling van zijn autonome voertuigen versnellen. De focus ligt op het beschikbaar maken van deze voertuigen in stedelijke gebieden.
De twee bedrijven kondigde in januari 2018 aan samen een dienst genaamd ‘Volkswagen Mobility-as-a-Service (MaaS)’ te willen opzetten. Met deze dienst kunnen gebruikers een zelfrijdend elektronisch voertuig bestellen om hen naar een gewenste locatie te laten brengen. Gebruikers hoeven zelf niet te investeren in dit voertuigen en betalen uitsluitend voor het gebruik hiervan.
Auteur: Wouter Hoeffnagel
Bron: Volkswagen (foto)
Bron: CROW

Windenergie met lamellen
Misschien herken je het wel als je zelf lamellen als raambekleding hebt: met het raam open kunnen ze zachtjes heen en weer waaien. Twee ingenieurs van het Amerikaanse leger lieten zich hierdoor inspireren voor een nieuw systeem om energie op te wekken. Samen met acht collega's ontwikkelden zij een systeem dat stroom opwekt bij windsnelheden die té gering zijn om de wieken van een traditionele windturbine te laten draaien.
Het prototype is voorzien van acht flexibele elektrische stroken die verticaal naast elkaar zijn gemonteerd en die aan de boven- en onderzijde aan PVC-buizen zijn bevestigd. Deze buizen kunnen worden gedraaid om de spanning van de stroken aan te passen.
De stroken bewegen onder een hoek zodat ze evenwijdig lopen met de windrichting. Net als de lamellen thuis voor het open raam, maken de stroken slangachtige beweging bij windsnelheden van minder dan 14 km/u . Terwijl ze dit doen, beweegt een koperen inductiespoel aan de onderkant van elke strip heen en weer langs een gladde, met magneten gevulde pijp die er horizontaal doorheen gaat. De beweging van de spoel tegen de magneten creëert een elektrische stroom, die naar een omvormer wordt geleid en van daaruit kan worden gebruikt om apparaten van stroom te voorzien of om batterijen op te laden.
Volgens TechLink, het centrum voor technologieoverdracht van het Amerikaanse Ministerie van Defensie, kan het systeem niet alleen worden gebruikt door troepen in het veld, maar kan het ook worden opgeschaald om stroom te produceren in regio’s waar doorgaans geen sterke wind is . Bijkomend voordeel: omdat er geen windturbinebladen door de lucht zoeven, blijft de schade voor het milieu en vogels of vleermuizen tot een minimum beperkt.
Momenteel wordt er gezocht naar een bedrijf dat de productie, toepassing of verkoop verder uit kan bouwen. Benieuwd hoe het prototype er uitziet en werkt? Kijk dan naar deze video.


Energie kan nu ook worden opgewekt uit…een vlag
Als het gaat om het vinden van nieuwe energiebronnen, komt de wetenschap steeds verder. Onderzoekers van de universiteit van Manchester hebben nu vlaggen ontwikkeld die door middel van zonne- en windenergie elektriciteit kunnen opwekken.
De nieuwe wind- en zonne-energie vlaggen zijn gemaakt met behulp van flexibele piëzo-elektrische strips en flexibele fotovoltaïsche cellen. De piëzo-elektrische strips zorgen ervoor dat de vlag energie genereert door middel van beweging, terwijl de fotovoltaïsche cellen de beste oplossing is voor het benutten van elektriciteit door het gebruik van zonnecellen.
Eerste onderzoek
De studie, uitgevoerd door onderzoekers aan de Universiteit van Manchester, is de meest geavanceerde in zijn soort tot nu toe en de eerste waarbij tegelijkertijd wind- en zonne-energie geoogst worden met behulp van ‘omgekeerde vlaggen’. De nieuw ontwikkelde vlaggen voor energiewinning kunnen sensoren op afstand en kleinschalige draagbare elektronica aandrijven die kan worden gebruikt voor omgevingswaarneming, bijvoorbeeld voor het bewaken van vervuiling, geluidsniveaus en warmte.
Het doel van het onderzoek is om goedkope en duurzame energieopvangoplossingen mogelijk te maken die kunnen worden ingezet en overgelaten om energie te genereren met weinig of geen onderhoud nodig. De strategie staat bekend als “deploy-and-forget” en dit is het verwachte model dat zogenaamde smart cities zullen gebruiken bij het gebruik van externe sensoren.
Klapperen
Jorge Silva-Leon, van Manchester School of Mechanical, Aerospace & Civil Engineering en hoofdauteur van de studie, zegt in een persbericht: “Onder invloed van de wind buigen de vlaggen die we hebben gebouwd op een repetitieve manier heen en weer, ook bekend als Limiet-cyclus oscillaties. Dit maakt ze perfect geschikt voor uniforme stroomopwekking door de vervorming van piëzo-elektrische materialen. Tegelijkertijd hebben de zonnepanelen een dubbel voordeel: ze fungeren als een destabiliserende massa die het begin van klapperende bewegingen bij lagere windsnelheden veroorzaakt, en natuurlijk in staat zijn om elektriciteit te genereren uit het omgevingslicht.
Dr. Andrea Cioncolini, co-auteur van de studie, voegt hieraan toe: “Wind- en zonne-energieën hebben doorgaans onderbrekingen die elkaar compenseren. De zon schijnt meestal niet tijdens stormachtige omstandigheden, terwijl rustige dagen met weinig wind meestal worden geassocieerd met glanzende zon. Dit maakt wind- en zonne-energieën bijzonder geschikt voor gelijktijdig oogsten, met het oog op het compenseren van hun onderbrekingen.”
Bron: Manchester University.
NASA bekroond winnende ontwerpen voor Mars-accommodaties in 3D-Printed Habitat Challenge
NASA heeft de drie winnaars van het meest recente niveau van fase 3 van de 3D-Printed Habitat Challenge bekend gemaakt. Deelnemende teams werden uitgedaagd een virtueel ontwerp te maken van hun woning voor Mars. De eerste prijs gaat naar Team SEArch+/Apis Cor.
De 3D-Printed Habitat Challenge is een wedstrijd die in 2015 door NASA werd gelanceerd. De wedstrijd daagt deelnemers uit een 3D-printbare leefomgeving te ontwerpen voor het verkennen van deep space. De woningen moeten daarnaast bruikbaar zijn tijdens de missie van NASA naar Mars, die NASA voor na 2030 op de planning heeft staan.
Centennial Challenges
De wedstrijd is onderdeel van NASA’s Centennial Challenges, waarmee de organisatie in 2005 het publiek uitdaagde om betrokken te zijn bij de ontwikkeling van ruimtevaarttechnologie. Via het programma worden incentives geboden om revolutionaire oplossingen te ontwikkelen waarvan NASA en de Verenigde Staten als geheel kunnen profiteren. NASA’s Centennial Challenges heeft als doel innovaties in wetenschap, technologische ontwikkelingen en het bouwen van prototypes die de prestaties van NASA kunnen verbeteren te stimuleren.
Binnen NASA’s Centennial Challenges is de 3-D Printed Habitat Challenge opgezet. Deze wedstrijd heeft als doel additieve productietechnieken, materialen en ontwerpen te ontwikkelen die nodig zijn om accomodaties te kunnen bouwen tijdens missies in deep space, waaronder de missie van NASA naar Mars. De wedstrijd is opgedeeld in drie fases, die ieder uit meerdere niveau’s bestaan. Door deze werkwijze wil NASA meer teams de gelegenheid geven deel te nemen aan de wedstrijd.
Fases
De 3-D Printed Habitat Challenge bestaat uit de volgende fases:
Fase 1 – deze fase was gericht op het ontwerp van teams en daagt teams uit architecturale renderings in te dienen. Deze fase werd in 2015 afgerond en gewonnen door Team Space Exploration Architecture and Clouds Architecture Office of New York voor hun ontwerp van het ‘Mars Ice House’.
Fase 2 – deze fase was gericht op de ontwikkeling van materialen en daagde deelnemers teams uit structurele componenten van hun accommodatie te 3D-printen. Deze fase werd in 2017 afgerond en gewonnen door Team Foster + Partners | Branch Technology.
Fase 3 – dit is de meest recente fase van de wedstrijd, die momenteel aan de gang is. In deze fase ligt de focus op het 3D-printen van het ontwerp dat teams hebben gemaakt. Teams worden in deze fase uitgedaagd in Building Information Modeling software elementen van hun accommodatie te ontwerpen en deze elementen te 3D-printen.
Vijf niveau’s
Fase 3 is net als andere fases opgedeeld in meerdere niveau’s. De derde fase kent vijf niveau’s, waarvan er drie gericht zijn op het fysiek construeren van een accommodatie en twee op het creëren van een virtuele representatie. Het meest recente niveau is het tweede virtuele niveau, wat het laatste niveau is van deze fase.
Deze fase is opgedeeld in een vijftal niveau’s, waarbij drie gericht zijn op het fysiek construeren van een accommodatie en twee op het creëren van een virtuele representatie. De winnaars van de laatste van deze twee virtuele niveau’s zijn nu door NASA bekend gemaakt. Het niveau is gewonnen door Team SEArch+/Apis Cor.
De tweede plaats gaat naar team Zopherus.
Team Mars Incubator sleept de derde plaats in de wacht.
Meer informatie over de 3D-Printed Habitat Challenge is hier te vinden.

Neuraal netwerk laat autonome voertuigen met onbekende omstandigheden omgaan
Een nieuw systeem kan de wijze waarop autonome voertuigen met veeleisende en onbekende omstandigheden omgaan verbeteren. Het neurale netwerk stelt zelfrijdende voertuigen in staat natuurkundige gegevens te combineren met eerdere rijervaringen om ook onder omstandigheden die het voertuig nog niet eerder heeft gezien veilig te rijden.
Het neurale netwerk is ontwikkeld door de Stanford University. Net als menselijke bestuurders worden autonome voertuigen met regelmaat geconfronteerd met veeleisende omstandigheden, zoals wegen die glad zijn door ijs of modder. Menselijke bestuurders kunnen in dit geval teruggrijpen op rijervaringen die zij eerder hebben gedaan om hun rijgedrag aan te passen en in deze omstandigheden veilig te kunnen rijden. Autonome voertuigen hebben deze mogelijkheid echter niet, aangezien deze voertuigen hun beslissingen doorgaans baseren op voorgeprogrammeerde regels en waarnemingen met behulp van sensoren en camera’s.
Natuurkunde combineren met data-gedreven methodes
“Met de hedendaagse technieken moet je doorgaans kiezen tussen data-gedreven methodes en methodes die gebaseerd zijn op fundamentele natuurkunde”, legt J. Christian Gerdes, als hoogleraar werktuigbouwkunde verbonden aan de Stanford University en betrokken bij de ontwikkeling van het neurale netwerk. “We denken dat de toekomst ligt in een combinatie van deze methodes, zodat de individuele krachten van beide benut kunnen worden. Natuurkunde kan helpen neurale netwerkmodellen te structureren en valideren, zodat zij vervolgens ingezet kunnen worden om massale hoeveelheden data te verwerken.”
Het neurale netwerk wordt ingezet om te bepalen welke weerstand een weg oplevert. Dit is een belangrijk gegeven dat onder meer bepaalt hoe hard een voertuig veilig kan afremmen, accelereren en bochten kan nemen. “Ervaren bestuurders, met name indien zij race-ervaring hebben op amateur-niveau of hoger, zijn in staat een voertuig veilig op de grens te laten opereren. In de racerij wordt dit gedemonstreerd door lage en consistente rondetijden neer te zetten. In een kritieke situatie betekent dit echter het kunnen inzetten van alle weerstand die de weg biedt om een ongeluk te voorkomen”, schrijven de onderzoekers in een wetenschappelijk artikel in Science Robotics.
Het neurale netwerk zet bij het analyseren van de weerstand van de weg informatie in die is verzameld tijdens eerdere rijervaringen die zijn opgedaan op de racebaan Thunderhill Raceway Park in Willows, Californië en in een wintertestfaciliteit. Deze ervaring is opgedaan met een tweetal zelfrijdende auto’s van de universiteit: een autonome Volkswagen GTI genaamd ‘Niki’ en een autonome Audi TTS genaamd Shelley.
Veiligheid
“Onze werk wordt gemotiveerd door veiligheid. We willen autonome voertuigen in uiteenlopende situaties laten opereren, variërend van rijden onder normale omstandigheden op asfalt met veel frictie tot snel rijden op ijs en sneeuw met weinig frictie”, aldus Nathan Spielberg, een postdoctoraal student werktuigbouwkunde van de Stanford University. “We willen dat onze algoritmes net zo goed presteren als de meest vaardige bestuurders – en hopelijk zelfs beter.”
Het neurale netwerk is tijdens een test vergeleken met een ervaren menselijke bestuurder. In de eerste fase van de test reed Shelley met een op natuurkunde gebaseerd model dat vooraf werd voorzien van informatie over de baan en omstandigheden. Met dit systeem wist de autonome Audi TTS gedurende tien rondes rondetijden neer te zetten die vergelijkbaar zijn met die van een ervaren coureur op amateurniveau. Vervolgens is de Volkswagen GTI van de universiteit ‘Niki’ met het nieuwe neurale netwerk de baan opgestuurd. Dit neurale netwerk kreeg tijdens deze test geen informatie mee over de weerstand van de weg en moest deze weerstand zelf bepalen op basis van eerdere rijervaringen. Desondanks noteerden Shelley en Niki gedurende de test vergelijkbare rondetijden.
Ook zijn gesimuleerde testen uitgevoerd. Tijdens deze testen presteerde het neurale netwerk beter dan het op natuurkunde-gebaseerde systeem, zowel in scenario’s met veel als weinig weerstand van de weg. Vooral in situaties waarin beide omstandigheden worden gecombineerd – zoals een koude winterdag waarop op sommige delen van de weg goed begaanbaar zijn en andere delen glad – presteert het systeem volgens de onderzoekers goed.
Netwerk verder ontwikkelen
De onderzoekers benadrukken dat hun neurale netwerk alleen goed presteert in omstandigheden die het eerder zelf heeft ervaren; met situaties waarin geen eerdere rijervaring is opgedaan kan het netwerk niet overweg. De onderzoekers wijzen echter op de enorme hoeveelheid data die vandaag de dag door autonome voertuigen worden verzameld. Indien deze gegevens worden ingezet om het neurale netwerk verder te trainen, is het mogelijk het netwerk verder te ontwikkelen en met een brede reeks omstandigheden om te laten gaan.
Auteur: Wouter Hoeffnagel
Bron: Stanford University
Foto door: Kurt Hickman

Metaalunie onderstreept met Industrievisie belang steun overheid voor maakindustrie
Vorige week heeft de Koninklijke Metaalunie op de Hannover Messe de Industrievisie 2019 overhandigd aan staatssecretaris Monica Keizer van Economische Zaken. De branchevereniging wil daarmee de noodzaak benadrukken van de steun van de overheid voor de maakindustrie. Dat lezen we in een persbericht.
“Het MKB-metaal is cruciaal voor een innovatief en krachtig economisch klimaat in Nederland”, zo trapt de Metaalunie de Industrievisie af. “Het gaat daarbij om het bedenken van nieuwe producten in combinatie met het slim maken van die producten. De bedrijven in de maakindustrie staan voor grote uitdagingen. Deze uitdagingen, gecombineerd met het relatief hoge niveau van arbeidskosten in Nederland, maken dat het voor een gezonde Nederlandse maakindustrie van essentieel belang is, dat de overheid een gedegen industriebeleid voert, gebaseerd op een stimulerend ondernemersklimaat.”

De branchevereniging stelt dat goed beleid de Nederlandse maakindustrie kan ondersteunen en stimuleren om slimmer te produceren. Dat zorgt ervoor dat Nederland waardevol blijft en werkgelegenheid behouden blijft. De Metaalunie vraagt op een actieve en op deze sector toegespitste ondersteuning en maatregelen om de kracht van het MKB-metaal te ondersteunen en versterken. Dit kunnen bijvoorbeeld maatregelen gericht op verhoging van de productiviteit door slimmer produceren, beleid dat er op gericht is dat de sector optimaal waarde kan creëren voor de Nederlandse economie en beleid dat nationaal aanbesteden door de overheid en het bedrijfsleven stimuleert. “Nederland heeft een overheidsbeleid nodig dat zich richt op het actief stimuleren van productie en waarde creatie in Nederland. Metaalunie werkt graag samen met de overheid aan maatregelen die de productiviteit van de mkb-metaalbedrijven versterkt. In onze welvarende, maar ook vergrijzende samenleving is groei van de arbeidsproductiviteit noodzakelijk om het welvaartsniveau niet alleen vast te kunnen houden, maar ook te laten stijgen”, aldus Fried Kaanen, voorzitter Koninklijke Metaalunie.
Productief produceren
De komende jaren moet de nadruk op de stimulering van procesinnovatie worden gelegd. De implementatie van nieuwe, vaak digitale, technologieën in de bedrijfsprocessen van mkb-maakbedrijven is noodzakelijk om de verwachte productiviteit¬stijging te realiseren. “Deze implementatie blijft structureel achter door te hoge kosten van investeringen, te zware inzet van mensen bij de implementatie en te hoge kosten voor extern advies”, laat Kaanen weten. “Innovatie stimuleren is op zich positief, maar daarnaast moet meer focus worden gelegd op de realisatie van procesinnovaties door de mkb-maakbedrijven.”
Mkb-maakbedrijven verbruiken relatief weinig energie. Dit laat onverlet dat het besparen van energie en de verduurzaming van de opwekking aandacht behoeft. De binnenlandse maakindustrie kan een enorme bijdrage leveren aan de klimaatopgave door “lokaal” te produceren voor bijv. wind op zee en land, PV-installaties en smart-grids. Een circulaire maakindustrie borgt bovendien dat grondstoffen behouden blijven, waaronder de zeldzame metalen die nodig zijn voor duurzame energieopwekking. Een circulaire binnenlandse maakindustrie vermijdt een enorme CO2-uitstoot elders in de wereld.
Overheid als opdrachtgever
Metaalunie vraagt om een breed programma, waarin de overheid acteert als launching customer in de diverse transities. Als Nederland bijvoorbeeld duurzamer wil bouwen, is het milieutechnisch gezien onaanvaardbaar dat we voor het Noordzeekanaal nieuwe sluisdeuren in Korea laten maken, die hier naar toe verschepen en die schepen weer leeg terug laten varen. Nog een voorbeeld, aanbesteding van Marineschepen aan een Frans bedrijf gunnen kan gebeuren. Maar zorg er dan wel voor dat de Nederlandse toeleverende industrie daar ook van meeprofiteert.
Zorg voor eenduidige regels, die goed door het mkb te hanteren zijn en handhaaf die dan ook. Een goede MKB-toets voor nieuwe regels helpt hierbij. Zorg dat de regels aansluiten bij de Europese regels, zodat er een gelijk speelveld binnen Europa ontstaat. Te zware lokale regels op milieu- en bestemmingsplangebied maken het ondernemers in de maakindustrie onnodig moeilijk.
Human capital
Voldoende vakmensen, die goed zijn opgeleid, zijn onmisbaar bij alle transities. In het beroepsonderwijs moet meer aandacht zijn voor beroepsvaardigheden, zodat leerlingen direct kunnen instromen in maakbedrijven. De actieagenda Technologie, die door de techniekbranches en het onderwijs gezamenlijk is opgesteld, beschrijft hier een concreet stappenplan voor en verbindt alle lopende initiatieven aan elkaar. Én, stimuleer zij-instroom vanuit minder traditionele gebieden.
Versterk de positie van de Nederlandse mkb-maakbedrijven in de Europese markten en heb daarbij vooral aandacht voor de ons omringende landen. Door de gematigde groei van de consumptie in Nederland moet het groeipotentieel voor de Nederlandse MKB-maakbedrijven worden gezocht in de uitbreiding van de export. De innovatieve kracht en de flexibiliteit van de mkb-maakbedrijven moeten benut worden door gerichte exportondersteuning en het wegnemen van drempels voor het mkb.
De volledige Industrievisie 2019 is hier te lezen.
Bron+algemene foto: Metaalunie.
3D-geprint weefsel kan osteochondraal letsel verhelpen
Onderzoekers zijn erin geslaagd osteochondraal weefsel te printen met behulp van een 3D-printer. De ontwikkeling kan uitkomst bieden voor patiënten met osteochondraal letsel, waarbij zowel het bot als kraakbeen is beschadigd.
De ontwikkeling komt uit de koker van de Amerikaanse Rice University. Osteochondraal letsel bestaat in allerlei vormen, zoals kleine scheurtjes die in het weefsel ontstaan of stukjes bot die afbreken. Dergelijk letsel veroorzaakt vaak pijnklachten en kan voor topsporters zelfs het einde van hun carrière betekenen.
Veelvoorkomende sportblessures verhelpen
“Athleten worden disproportioneel beïnvloed door dit soort letsel, maar iedereen kan hierdoor getroffen worden”, legt Sean Bittner, een student van de Rice University en lid van het onderzoeksteam, uit. “Ik denk dat dit een krachtige tool kan zijn om mensen met veelvoorkomende sportblessures te helpen.”
Tot nu toe was het niet mogelijk osteochondraal weefsel na te maken, waardoor dergelijk letsel slechts beperkt kon worden aangepakt. De grootste uitdaging hierbij is de geleidelijke overgang van kraakbaan naar bot in dit weefsel, wat moeilijk kunstmatig gereproduceerd kan worden. Hier zijn onderzoekers van de Rice University nu wel in geslaagd. De onderzoekers publiceren hun bevindingen in Acta Biomaterialia.
Polymeer en keramiek
De onderzoekers hebben een materiaal gecreëerd dat bestaat uit een combinatie van polymeer en keramiek. Het polymeer bootst hierbij het kraakbeen na, terwijl het keramiek het bot representeert. Deze materialen gaan geleidelijk in elkaar over, net als in osteochondraal weefsel in het menselijk lichaam. De samenstelling van het materiaal kan worden afgestemd op de patiënt, maar zal volgens Bitner voor de meeste patiënten identiek zijn.

Het 3D-geprinte osteochondraal weefsel (foto door: Jeff Fitlow)
Het materiaal is voorzien van poriën, waardoor de eigen cellen en bloedvaten van een patiënt in het materiaal kunnen groeien. Het materiaal kan hiermee uiteindelijk onderdeel worden van het natuurlijke bot en kraakbeen van een patiënt. “Door de porositeit kunnen bloedvaten vanuit het natuurlijk bot groeien. We hoeven zelf dus geen bloedvaten te fabriceren”, aldus Bitner.
‘Grote impact’
Het onderzoeksteam staat onder leiding van Antonios Mikos, als biowetenschapper verbonden aan de Rice University. Mikos spreekt over een groot succes in de ontwikkeling van bioprinting tools waarmee basale wetenschappelijke vragen kunnen worden beantwoord en nieuwe kennis in de klinische praktijk kan worden gebracht. “In deze context heeft deze ontwikkeling een grote impact en kan leiden tot nieuwe regeneratieve medicinale oplossingen”, aldus Mikos.
Auteur: Wouter Hoeffnagel
Bron: Rice University