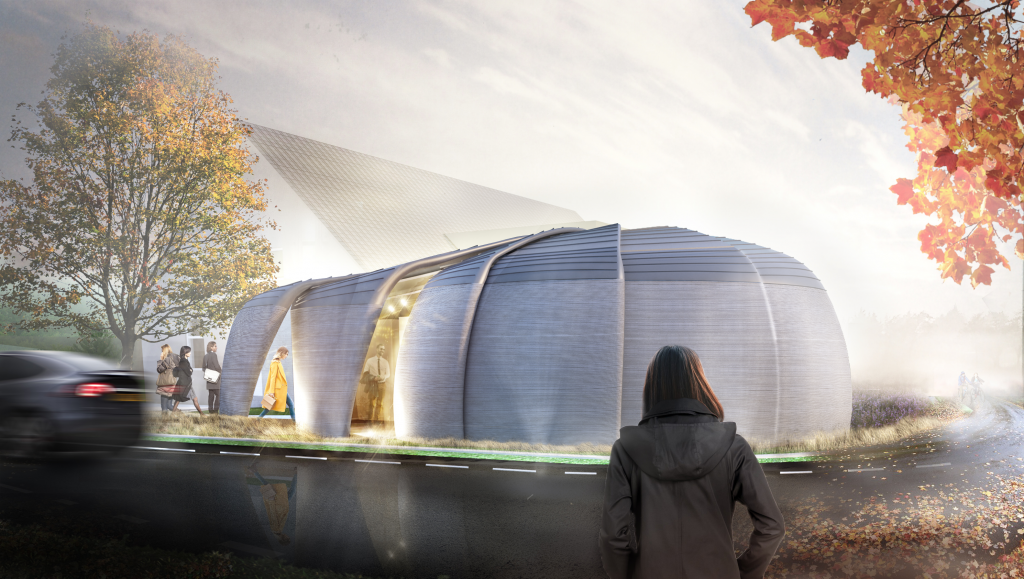
Teuge krijgt eerste commerciële 3D-geprinte gebouw
Op 3 oktober 2018 is de omgevingsvergunning voor het eerste commercieel 3D-geprinte gebouw van Europa verstrekt. In Teuge wordt dit jaar De Vergaderfabriek geprint, een gebouw van honderd vierkante meter.
Uit onderzoek blijkt dat dit het eerste gebouw in Europa is dat op basis van een commerciële opdracht en op locatie 3D geprint wordt. Opdrachtgevers Arvid Prigge van Centre4Moods en Marjo Prigge-van der Linden van De Slaapfabriek vertellen erover. “Wij zagen dat het tijd was voor een uniek vergaderconcept waarmee we individuele gasten, groepen en teams een onvergetelijke ervaring bezorgen. De ronde vorm, het gebruik van duurzame materialen en de technologie aan de binnenkant van het gebouw konden niet worden bereikt met de traditionele bouw. Vandaar onze keuze voor 3D-printing.”
Van omgevingsvergunning naar bouw
Nu de omgevingsvergunning is verleend, kan er gestart worden met de bouw. Daarbij heeft CyBe de taak van hoofdaannemer op zich genomen. Deze marktintroductie van het commercieel 3D-betonprinten in Europa op locatie is straks een onderdeel van het terrein van Centre4moods en Hotel de Slaapfabriek. Arvid en Marjo willen met De Vergaderfabriek verder uiting geven aan de revolutionaire en schaalbare nieuwe manieren van vergaderen, trainen en beleven. Samen met adviesbureau Revelating hebben zij het team van bedrijven samengesteld die zij zien als de top van de Nederlandse 3D-print- en -bouwindustrie, te weten: The Form Foundation, Witteveen+Bos, CyBe, Elma Media en Lexence Advocaten. Als team zijn zij de uitdagingen van dit project aangegaan en hebben zij de innovaties gedaan om dit project mogelijk te maken. De uitdagingen zitten in zowel de constructiemethode, het ontwerp, organisatorische en juridische zaken en de risico’s die hieraan ten grondslag liggen. Projectleider Hugo Jager: “Het proces was een aaneenschakeling van proberen, analyseren en aanpassen, waarbij het doel altijd duidelijk is geweest: bewijzen dat 3D-printen technisch en economisch zinnig is.”
Van idee naar 3D-geprint gebouw
Het ontwerp van architect Pim van Wylick zet de wensen van Centre4Moods om in een gebouw. Centre4Moods maakt gebruikt van 360 gradenprojectie om bezoekers onder te dompelen in een zintuigelijke beleving. Hiervoor heeft de architect de ronde ruimte als uitgangspunt genomen. De voorzieningen zijn hieromheen geplaatst. Het gebouw ligt naast de entree naar vliegveld Teuge. Een vliegveld met een lange historie, dat zijn stempel drukt op de omgeving. Het gebouw markeert de hoek en opent zich langzaam naar de ingang en naar het uitzicht over de velden aan de andere kant van de weg. Deze aaneenschakeling van open en dicht, met een cirkelvormige ruimte als basis, heeft geleid tot een gebouw dat zich manifesteert als de bladen van een turbine. De bladen draaien en openen hiermee doorzichten of sluiten ze, al naar gelang de positie van de waarnemer. Het gebouw is hierdoor vanaf iedere hoek anders. Een dergelijke vorm is met traditionele bouwmethoden niet of nauwelijks te bouwen. Dat heeft geleid tot een ontwerp waarin de gekromde wanden, alle verschillend van vorm, 3D-geprint worden in beton.
Bron: Centre4Moods

Amerikaanse marine bouwt barakken met grootste 3D-printer ter wereld
Het Amerikaans leger is steeds meer aan het experimenteren met nieuwe technologieën. Met name 3D-printing biedt veel mogelijkheden voor de organisatie. Zo heeft ze onlangs de grootste 3D-printer ter wereld ingezet om een barak van ongeveer 46 vierkante meter te maken.
Een paar maanden geleden werd de printer operationeel gemaakt bij het U.S. Army Engineer Research and Development Center in de staat Illinois. De Additive Manufacturing Team van het Marine Corps Systems Command werkten samen met mariniers van het Marine Expeditionary Force om met de 3D-betonprinter een kazerne van ruim veertig vierkante meter te bouwen. Dat gebeurde binnen een tijdsbestek van veertig uur.
“Deze oefenings is nog niet eerder gedaan”, zegt Matthew Friedell, een van de projectleiders in een persbericht. “Mensen hebben al gebouwen en grote constructies geprint, maar het is nog niet eerder onsite en allemaal tegelijk gedaan. De printer heeft hier achter elkaar gedraaid.”
Kan nog sneller
Het team begon met een door de computer ondersteund designmodel op een tien jaar oude computer. Zodra ze op ‘print’ drukten, werd het beton door de printerkop geduwd en herhaaldelijk in lagen aangebracht om zo de muren te bouwen. Het kostte nu nog zo’n veertig uur omdat mariniers het proces moesten monitoren en bovendien de printer bij moesten vullen met beton. Als dit door een robot gedaan zou worden, dan zou de kazerne volgens Friedell makkelijk in één dag te maken zijn. “We hebben het er eerderl al over gehad: een robot zou alles moeten doen dat saai, gevaarlijk en vies werk is en een bouwplaats bij een slagveld is dat allemaal. Het zou een mooie vooruitgang zijn als we onderkomen kunnen bouwen zonder veel mariniers in gevaar te brengen. Je wilt ze niet laten rondlopen met hamers en multiplex.”
Als het 3D-printen uiteindelijk geïmplementeerd zou kunnen worden bij de marine, dan kunnen bijvoorbeeld ook snel huizen, scholen en andere gebouwen geprint worden in gebieden die door een (natuur)ramp zijn getroffen. Vooral omdat beton vaak beter voorhanden is dan bijvoorbeeld hout.
Het AD-team van het leger gaat in elk geval verder onderzoek doen naar 3D-printen. Ze willen er in elk geval meer mariniers mee in aanraking laten komen, zodat bepaald kan worden welke vereisten er nog nodig zijn voor toekomstige technologieën en autonome sysgtemen. “Onze toekomste werkomgevingen zullen zeer kinetisch en gevaarlijk zijn, omdat we niet altijd zozeer weten waar we ingaan. Het idee dat we daar in de toekomst mariniers weg kunnen halen en er robots voor in de plaats kunnen zetten, helpt ons bij onze missies.”
Bron: Marines.mil
Foto: Courtesy photo
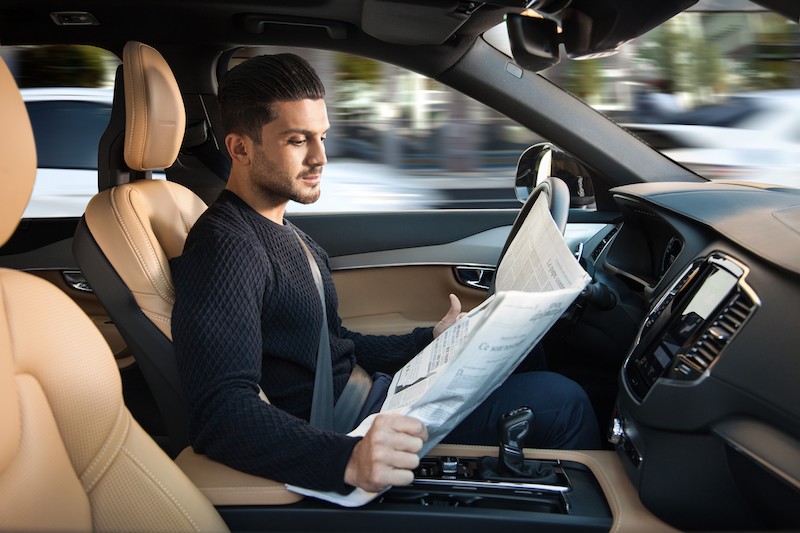
Volvo gaat Level 2+ autonoom rijden mogelijk maken in productieauto's
Volvo Cars gaat de DRIVE AGX Xavier-technologie van chipfabrikant NVIDIA inzetten in zijn volgende generatie automodellen. Met behulp van de technologie wil Volvo Level 2+ autonome voertuigen gaan ontwikkelen. Op termijn moeten de systemen die Volvo gaat bouwen worden doorontwikkeld om Level 4 zelfrijdende auto's mogelijk te maken.
Autonoom rijden wordt doorgaans opgedeeld in vijf niveau’s, waarbij op level 0 geen automatisering aanwezig is en op level vijf een voertuig volledig geautomatiseerd kan rijden. Level 2 wordt door kenniscentrum CROW gedefinieerd als een systeem dat alle operationele rijtaken overneemt van de bestuurder, zoals sturen, remmen en versnellen. Daarnaast worden op dit niveau ook tactische rijtaken in beperkte mate overgenomen. De bestuurder blijft nauw betrokken bij de besturing van level 2 voertuigen. Bij level 3 worden alle operationele rijtaken van de bestuurder en een deel van de tactische en strategische rijtaken van de bestuurder overgenomen. Indien nodig moet de bestuurder in staat zijn de controle over het systeem direct weer over te nemen.
Rijtaken overnemen in veel voorkomende situaties
Level 2+ waar NVIDIA over spreekt staat officieel niet in dit rijtje en zit tussen level 2 en level 3 in. Het bedrijf stelt dat deze systemen verder gaan dan traditionele geavanceerde ondersteunende systemen voor bestuurders die we vandaag de dag kennen. Ook Intel sprak eerder over level 2+ en definieert dit als consumentgerichte systemen die rijtaken in veel voorkomende omstandigheden op onder andere snelwegen kunnen overnemen.
Volvo wil dit niveau van autonoom rijden mogelijk maken in zijn volgende generatie automodellen, waarvan de lancering voor het begin van het volgende decennium op de planning staat. Het bedrijf kiest hierbij voor het DRIVE AGX platform, dat door NVIDIA specifiek is ontwikkeld voor zelfrijdende auto’s. Het platform maakt het mogelijk data in real-time te verwerken. Denk hierbij aan:
- informatie verzameld door sensoren, radarsystemen en LIDAR sensoren;
- data die nodig is om de exacte locatie van het voertuig te bepalen;
- gegevens die het mogelijk maken een veilige route te plannen.
System-on-Chip
Het DRIVE AGX platform is gebaseerd op een System-on-a-Chip (SoC), een computersysteem waarvan alle componenten op één chip zijn geïntegreerd. Binnen het AGX platform kan worden gekozen uit twee systemen: DRIVE AGX Xavier en DRIVE AGX Pegasus. Het belangrijkste verschil tussen beide systemen is hun rekenkracht. Zo is de DRIVE AGX Xavier voorzien van één Xavier SoC en biedt een rekenkracht van 30 Total Operations Per Seconde (TOPS). De DRIVE AGX Pegasus is gericht op toepassingen die meer rekenkracht vereisen. Deze variant is voorzien van twee Xavier SoC’s en twee Tensor Core grafische processors (GPU’s). De DRIVE AGX Pegasus biedt een rekenkracht van 320 TOPS, meer dan tien keer zoveel als zijn kleine broertje.
Autofabrikanten die van het platform gebruik maken kopen hiermee de hardware die zij nodig hebben om voertuigen zelfrijdend te maken. Daarnaast stelt NVIDIA ontwikkeltools die beschikbaar waarmee autofabrikanten zelf software voor zelfrijdende auto’s kunnen ontwikkelen en testen. “Een succesvolle lancering van autonoom rijden vereist een enorme hoeveelheid rekenkracht, evenals continue ontwikkelingen in kunstmatige intelligentie”, aldus Håkan Samuelsson, president en chief executive van Volvo Cars. “Onze overeenkomst met NVIDIA is een belangrijke onderdeel van deze puzzel en helpt ons op veilige wijze volledige autonome Volvo auto’s te introduceren aan onze klanten.”
Naast Volvo maken ook Audi, Mercedes-Benz, Tesla, Toyota en Volkswagen maken gebruik van het DRIVE AGX platform.
Samen features ontwikkelen
Met Volvo gaat NVIDIA samenwerken aan de ontwikkeling van functionaliteiten voor zelfrijdende auto’s. Denk hierbij aan een systeem dat autonome voertuigen in staat stelt een 360 graden zicht te krijgen over hun omgeving. Een ander voorbeeld dat wordt genoemd is een systeem dat de bestuurders van autonome voertuigen monitort. Dit aspect is zeker bij lagere niveau’s van zelfrijdende voertuigen niet onbelangrijk, aangezien bestuurders altijd in staat moeten zijn de controle over voertuigen weer over te nemen. Bestuurders hoeven soms zelf echter langere tijd niet zelf te rijden, waardoor het risico bestaat dat zij hun concentratie verliezen of zelfs in slaap vallen.
Volvo wil het platform ook inzetten om nieuwe connectiviteitsdiensten, energiebeheertechnologie en personalisatiemogelijkheden te ontwikkelen voor toekomstige automodellen. Details over deze plannen ontbreken vooralsnog.
Auteur: Wouter Hoeffnagel
Bron: Volvo Cars (foto)
Bron: NVIDIA
Bron: Intel
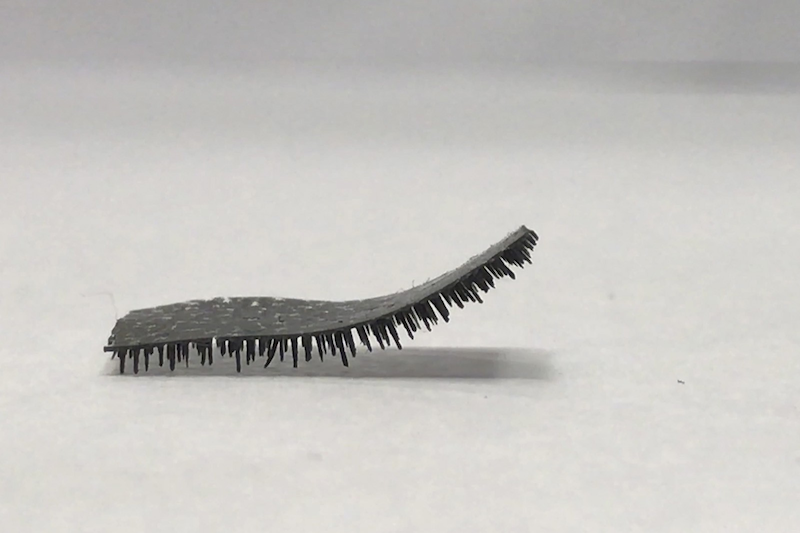
Robot brengt gericht afleveren van medicatie in lichaam dichterbij
Een nieuwe minuscule robot brengt het gericht afleveren van medicatie op specifieke locaties in het menselijk lichaam een stap dichterbij. De robot kan dankzij zijn ontwerp efficiënt door het menselijk lichaam bewegen. Door de aanwezigheid van uiteenlopende structuren van weefsels en lichaamsvloeistoffen is het menselijk lichaam voor robots een uitdagende omgeving die allerlei obstakels bevat.
Medicatie wordt momenteel niet gericht afgeleverd, waardoor het door het menselijk lichaam moet reizen om zijn doel te bereiken. Deze werkwijze kent belangrijke nadelen. Zo bereikt medicatie niet alleen de bedoelde locatie, maar kan ook gezond weefsel aantasten. Robots maken het mogelijk medicatie gerichter af te leveren. Door medicatie met minuscule robots in het menselijk lichaam te vervoeren naar de gewenste locatie kan medicatie veel nauwkeuriger worden toegediend en dergelijke negatieve bijeffecten worden voorkomen.
Moeilijke omstandigheden voor robots
Het is echter niet eenvoudig een robot door het menselijk lichaam te laten bewegen, onder meer doordat de omstandigheden in het menselijk lichaam de tocht van de robot bemoeilijkheden. Zo krijgt de robot in het lichaam te maken met oppervlaktes die bedekt zijn met lichaamsvloeistoffen als bloed of slijm, waardoor de robot moeilijk grip kan krijgen. Daarnaast moet de robot door ruimtes reizen die gevuld zijn met dergelijke vloeistoffen en ook hier zich efficiënt weten voort te bewegen.
“Het ruwe oppervlak en de variërende textuur van verschillende soorten weefsels in het menselijk lichaam maken transport een uitdaging. Onze meerpotige robot toont indrukwekkende prestaties in uiteenlopende terreinen en maakt een brede reeks toepassingen mogelijk om medicatie in het menselijk lichaam af te leveren”, legt hoogleraar Wang Zuankai van het Department of Mechanical Engineering (MNE) van de City University of Hong Kong (CityU) uit.
Honderden kleine poten
Een onderzoeksteam onder leiding van de CityU heeft een robot ontwikkeld die goed overweg kan met dergelijke omstandigheden en het gebruik van dergelijke robots daarmee dichterbij brengt. De robot is voorzien van honderden kleine poten van minder dan 1 mm lang, die de robot in staat stellen zich efficiënt voort te bewegen door het menselijk lichaam.
De robot is geïnspireerd op de natuur, meldt de universiteit. De onderzoekers hebben honderden landdieren geanalyseerd, waarbij de focus lag op de poten van de dieren. “De meeste dieren hebben een verhouding van 2:1 tot 1:1 tussen de lengte van hun poten en de afstand hiertussen. We hebben daarom besloten onze robot een 1:1 verhouding te geven”, legt Dr. Shen Yajing, als hoogleraar verbonden aan het Department of Biomedical Engineering van CityU. Het onderzoeksteam stond onder leiding van Yajing.
Minimale frictie
De minuscule robot heeft een lichaam van slechts 0,15 mm dik. De poten zijn ieder 0,65 mm lang, terwijl de afstand tussen de benen 0,6 mm bedraagt. Deze poten zijn puntig om hun contactoppervlakte te minimaliseren en daarmee de wrijving die ontstaat op het moment dat de robot door het menselijk lichaam kruipt. De onderzoekers melden op basis van testen in laboratoria dat hun robot zowel onder droge als natte omstandigheden veertig maal minder frictie oplevert dan een robot zonder poten.
Deze testen wijzen ook uit dat de robot in staat is obstakels te beklimmen die tienmaal hoger zijn dan de lengte van zijn poten. Hierbij tilt de robot een deel van zijn lichaam op en plaatst deze onder een hoek van maximaal 90 graden om zijn poten op het obstakel te kunnen zetten en hier overheen te klimmen. De robot is in staat tijdens deze reis een lading te vervoeren die maar liefst honderd maal zwaarder is dan hijzelf, waarmee de robot wat betreft kracht vergelijkbaar is met een mier. Ter vergelijking: dit staat gelijk aan een mens die een minibus met ruimte voor 26 passagiers optilt.
Polydimethylsiloxaan met magnetische deeltjes
De robot is vervaardigd uit een silicone materiaal genaamd polydimethylsiloxaan. Dit is een veelgebruik polymeer waarin silicium is verwerkt. In dit materiaal hebben de onderzoekers magnetische deeltjes geïntegreerd, die het mogelijk maken de robot met behulp van een magneet vanaf buiten het lichaam aan te sturen en naar de gewenste locatie te leiden. De snelheid waarmee de robot zich voortbeweegt kan worden aangepast door de elektromagnetische frequentie te veranderen.
“Zowel het materiaal als het meerpotige ontwerp verbetert de hydrofobische eigenschappen van de robot aanzienlijk. Daarnaast is het rubberen materiaal zacht en kan het eenvoudig worden gesneden om robot van allerlei vormen en afmetingen voor verschillende toepassingen te geven”, zegt Wang.

Op twee manieren voortbewegen
Eenmaal in het lichaam kan de robot zich op twee manieren voortbewegen. Bij de eerste methode beweegt de robot uitsluitend zijn poten aan de voorzijde van zijn lichaam en trekt zichzelf hiermee als het ware voort. Bij de tweede methode ‘loopt’ de robot door zijn rechter- en linkerpoten afwisselend van elkaar te bewegen. Deze laatste werkwijze heeft wat weg van de wijze waarop de mens loopt, waarbij de ene voet telkens voor de andere voet wordt geplaatst.
Het onderzoeksteam wil de robot de komende tijd verder ontwikkelen. Centraal staat hierbij:
- het vinden van een geschikt biologisch afbreekbaar materiaal;
- het bestuderen van nieuwe vormen die de robot kan worden gegeven;
- het introduceren van extra features.
Nadat de robot verder is doorontwikkeld wil het team de robot testen op dieren en uiteindelijk mensen. “We hopen in de komende twee tot drie jaar een biologisch afbreekbare robot te ontwikkelen die op natuurlijk wijze wordt afgebroken zodra het zijn medicatie heeft afgeleverd”, licht Shen toe.
Veel overeenkomsten met Duitse robot
De robot van de CityU lijkt overigens veel op een robot die eerder dit jaar werd gepresenteerd door het Duitse Max Planck Institute for Intelligent Systems. Ook deze minuscule robot kan medicatie gericht in het menselijk lichaam afleveren. Net als de robot van CityU kan deze robot met behulp van een magneet worden aangestuurd dankzij magnetische deeltjes die in het lichaam van de robot zijn verwerkt.
Er zijn meer overeenkomsten. Zo is de robot van het Duitse instituut eveneens in staat over ongelijk terrein en door lichaamsvloeistoffen te navigeren. Net als de robot van CityU is de robot van het Max Planck Institute daarnaast in belangrijke mate geïnspireerd op de natuur. De Duitse onderzoekers hebben gekeken naar de wijze waarop larven van kevers, rupsen en kwallen zich voortbewegen.
De robot van het Max Planck Institute is getest in een kunstmatig chirurgisch model van de menselijke maag en het weefsel van een kip. In beide gevallen wist het onderzoeksteam de robot naar de gewenste bestemming te loodsen door deze met behulp van magnetische velden te sturen. Meer informatie over deze robot is hier te vinden.
Auteur: Wouter Hoeffnagel
Bron: City University of Hong Kong (foto)
Bron: EurekAlert!
Bron: Max Planck Institute for Intelligent Systems

'Omzet Europese maakindustrie gaat groeien door kunstmatige intelligentie'
Industriële bedrijven verwachten de komende jaren met name te kunnen groeien door kunstmatige intelligentie (AI). AI biedt hen mogelijkheden voor meer efficiëntie, flexibiliteit en differentiatie. Dit blijkt uit onderzoek onder 858 professionals en executives uit de industriële sector, uitgevoerd door Hewlett Packard Enterprise (HPE) en Industry of Things World, de grootste industriële IoT-conferentie van Europa. Ontoereikende kwantitatieve en kwalitatieve data, maar ook een gebrek aan AI-expertise worden gezien als grootste uitdagingen voor verdere AI-adoptie, zo lezen we op Executive People.
De ondervraagde Europese industriele bedrijven verwachten dat AI de kosten zal verminderen en tegelijkertijd voor meer omzet zal zorgen en de differentiatie zal verbeteren door middel van nieuwe producten en maatwerk. Gemiddeld denken de ondervraagden dat de omzet met 11,6 procent zal groeien en de marges met 10,4 procent verminderen dankzij AI.
Deze verwachting komt onder meer voort uit de successen die ondernemers al hebben behaald door kunstmatige intelligentie. Maar liefst 95 procent van de ondervraagden gaf aan dat ze hun doelstellingen door kunstmatige intelligentie veel sneller hebben behaald. De meeste ondenermers zijn van plan om de komende twaalf maanden 0,48 procent van hun omzet in AI te investeren. Dat is veel als je bedenkt dat het gemiddelde overall-budget voor IT 1,95 procent is in de maakindustrie.
Voordelen
Met al dit optimisme is het enigszins teleurstellend dat ‘slechts’ 11% van de ondervraagden tot op heden een AI-oplossing heeft geïmplementeerd, zelfs in de vorm van een proof-of-concept. Maar dat aantal heeft volgens de onderzoekers twee zeer sterke kanttekeningen nodig: ten eerste hebben we het over een opkomende technologie, dus dat in acht nemende wordt het vrij snel opgepakt. Ten tweede tweede, als de 50 procent van de respondenten meetellen die op dit moment actief AI-oploissingen overwegen of zelfs al gepland hebben, komen we uit op 61 procent van bedrijven die AI hebben geimplementeerd.
De redenen dat bedrijven interesse hebben in AI laten ook zien dat er groeiend begrip komt voor de voordelen van AI. Dat gaat niet alleen om kostenbesparing. Ondernemers vinden het ook belangrijk dat de klantervaring verbeterd wordt, producten en diensten verrijkt worden door het toevoegen van nieuwe eigenschappen en snel en automatisch aangepast kan worden aan veranderende omstandigheden.
Twijfels
Er zijn echter ook nog genoeg redenen dat industriële bedrijven twijfelen over het opschalen van AI in hun waardeketen. Data is het belangrijkste struikelblok. Veel ondernemers benoemen een gebrek aan data en kwaliteit om AI-modellen te vullen. Industriebedrijven realiseren zich dat hun AI-oplossingen slechts zo goed kunnen zijn als de informatie die ze gegeven wordt. Dat betekent dat er naast AI vaak nog een volledige data-infrastructuur opgezet moet worden. Ook vrezen veel ondernemers (42 procent) dat hun bedrijf over te weinig analytische kennis en vaardigheden beschikt.
Kortom, er is een positieve gedachtegang als het gaat om de implementatie van AI, maar bij de meeste bedrijven zijn nog wel flink wat stappen nodig om goede AI-oplossingen te kunnen implementeren. “Kunstmatige intelligentie vormt de kern van de vierde industriële revolutie. Het is een belangrijk element in de stap van automatisering naar autonomie, maar ook in het creëren van groei en concurrentievoordeel”, aldus Volkhard Bregulla, Vice President Global Manufacturing, Automotive en IoT bij HPE op Executive People. “Uit ons onderzoek blijkt dat de Europese industriële sector de strategische kracht van AI heeft begrepen en omarmd, maar laat ook de essentie zien van het dichten van de kloof tussen data en skills om het potentieel volledig te ontketenen.”
Executive People schreef ook nog een aantal andere belangrijke bevindingen uit het onderzoek op:
• De use cases waarin respondenten gebruikmaken van AI zijn verspreid over de gehele waardeketen, inclusief Research & Development (38 procent), demand forecasting (21 procent), productieplanning (18 procent), operations (32 procent), onderhoud (34 procent), verkoop (20 procent) en services (29 procent).
• Kerndoelen van AI-implementaties zijn onder andere efficiëntieverhoging in operations, onderhoud en waardeketens (57 procent), verbeteren van de klantervaring (45 procent), verbeteren van producten en diensten door nieuwe functies toe te voegen (41 procent), snel en automatisch aanpassen aan veranderende omstandigheden (37 procent), creëren van nieuwe bedrijfsmodellen (34 procent) en het beter afstemmen van vraag en aanbod met verbeterde prognoses en planningen (32 procent).
• Onderzoeksresultaten suggereren dat hybride AI-architecturen de komende jaren norm zullen worden. Verwacht wordt dat in 2030 55 procent van de implementaties gebruikmaakt van datacenters en/of cloud, terwijl het in 52 procent van de gevallen via ‘de edge’ zal gaan.
Bron: HPE/Executive People
Foto: Unsplash/Kevin Ku.

Zelfvarende boten getest in Amsterdam
Onderzoekers van de TU Delft, Wageningen University en het Massachusetts Institute of Technology (MIT) hebben vorige week in Amsterdam een eerste demonstratie uitgevoerd met zelfvarende boten. De zogenoemde Roboats moeten uiteindelijk ingezet worden om opstoppingen in drukke, waterrijke binnensteden te verminderen.
De Roboat heeft inmiddels zijn tweede onderzoeksjaar achter de rug. In het afgelopen jaar werden enkele belangrijke resultaten behaald, zoals het autonoom maken van de voertuigen en een vergrendelingssysteem waarmee de boten individueel kunnen linken en aanmeren. Ook werd onderzocht in hoeverre de boten van pas kunnen komen bij afvalverwerking en voedseldistributie.
Autonomy achieved
Maar hoe beweegt zo’n robotvaartuig zich nou door de grachten van Amsterdam? De Roboat is in staan om de beste route van punt A naar B te bepalen. Het bepaalt niet alleen hoe druk het is op het water, het houdt ook rekening met de unieke kenmerken van de kanalen en bruggen en mogelijke obstakels die het onderweg tegen kan komen. Om de onderzoeken en ontwikkeling van de technologie van de autonome navigatie te versnellen, worden huidige prototypes ontwikkeld om een schaal van 1:4.
De positie van het vaartuig wordt bepaald met behulp van LIDAR (Laser Image Detection and Ranging), waaraan ook GPS-sensoren zijn toegevoegd. De laserrader brengt de omgeving heel precies in kaart. Als de Roboat een obstkeln in het water tegenkomt, kan hij bepalen of een vast of bewegend object is en hoe ver hij nog van het object verwijderd is. Daarna wordt de beste manouvre bepaald om het obstakel te vermijden. Daarna wordt de meest optimale route voortgezet. Verschillende algoritmes leren de boot om het gedrag van verschillende objecten en andere vaartuigen op het water te herkennen. Hoe meer tijd de boot door de grachten navigeert, hoe beter de schattingen worden.
“Wat uniek is aan de autonome technieken die we hebben toegepast op de Roboat is dat het controlesysteem behoorlijk wordt uitgedaagd in de uitdagende stedelijke omgeving van Amsterdam. Door de Roboat te testen in de grachten van deze stad, krijgen we goede inzichten om het controlesysteem te verbeteren voor omgevingen zoals deze. Dat is iets dat in eerdere projecten voor autonome vaartuigen nog niet gedaan”, aldus Carlo Ratti, de directeur van de MIT Senseable City Lab.
Tijdelijke infrastructuren
Omdat de schepen aan elkaar kunnen worden gekoppeld, kunnen tijdelijke infrastructuren worden opgezet om bruggen of platforms te maken, of kunnen Roboat-eenheden fungeren als duw- en sleepboten. In het tweede jaar van onderzoek werd het mechanisme voor het vergrendelen of koppelen van schepen aan de kade verder ontwikkeld. De schepen kunnen elkaars positie op het water bepalen met behulp van GPS. Wanneer de schepen elkaar voldoende zijn benaderd om in zicht te komen, neemt LIDAR de lokale positionering over. Eenmaal dichterbij wordt de camera gebruikt, die de visuele indicatoren van het vergrendelingsmechanisme herkent. Dit is de laatste stap voordat het mechanisme wordt geactiveerd en de schepen met elkaar verbonden of naar de kade gedreven worden.
De makers denken dat autonome boten goed van pas kunnen komen in een drukbevolkte stad als Amsterdam, waar ook nog eens veel water doorheen loopt. “Aangezien 25 procent van Amsterdam uit wateroppervlak bestaat, is dit de ideale omgeving om zijn huidige infrastructuur uit te breiden met de implementatie van autonome vaartuigen. Hierdoor wordt de druk van het relatieve kleine maar drukke stadscentrum gehaald. Als er bijvoorbeeld afval opgehaald zou worden op het water, dan zou dat de verkeersbewegingen op straat verminderen. De containers worden in het water geplaatst, zodat ook het mooie zicht op de grachten niet verpest wordt.
Verder onderzoek
De verdere ontwikkeling van de Roboat wordt voortgezet. In het derde jaar gaan de onderzoekers zich onder andere bezig houden met de ontwikkeling van een prototype op de schaal van 1 op 2, het testen van stadsvervoer, verbeteren van het energysysteem en voortstuwingssysteem en het ontwikkelen van nieuwe sensoren om de kwaliteit van het water te meten.
Bron: AMS/De Ingenieur

Humanoïde robot bouwt autonoom gipswand op (video)
Een nieuwe humanoïde robot kan op bouwplaatsen en productielocaties lichamelijk belastende en gevaarlijke werkzaamheden gaan uitvoeren voor de mens. Dergelijke robots kunnen helpen personeelstekorten die ontstaan door onder andere vergrijzing helpen opvangen. Daarnaast kunnen humanoïde robots helpen de veiligheid op onder andere bouwplaatsen te vergroten en het aantal werkgerelateerde blessures terug te dringen.
Het gaat om de HRP-5P, een robot ontwikkeld door de Humanoid Research Group van het Japanse National Institute of Advanced Industrial Science and Technology (AIST). De HRP-5P is een humanoïde robot, een categorie robots die veel weg hebben van de mens. Zo beweegt de robot zich voort met behulp van twee benen en worden de armen van de robot onder andere gebruikt om objecten te manipuleren. De HRP-5P weegt 101 kilogram en is 182 centimeter hoog. De robot maakt onderdeel uit van de HRP reeks humanoïde robots die het instituut heeft ontwikkeld om de mogelijkheden van dit soort robots te demonstreren.
Speciale koppelingen als gewrichten
Overigens zijn er ook de nodige verschillen tussen de wijze waarop de HRP-5P en de mens bewegen. Zo biedt de nek van de robot twee vrijheidsgraden, zijn middel drie vrijheidsgraden, iedere arm acht vrijheidsgraden, de benen beide zes vrijheidsgraden en iedere hand twee vrijheidsgraden. Dit is nog altijd minder dan de mens.
Om dit te compenseren en desondanks menselijke bewegingen te kunnen nabootsen is de HRP-5P voorzien van speciale koppelingen, die dienst doen als gewricht. Deze koppelingen geven de robot de mogelijkheid zijn armen en benen veel flexibeler bewegen dan de mens. Zo biedt de heup van de mens een bewegingsvrijheid van zo’n 140 graden, terwijl deze bij de HRP-5P 202 graden bedraagt. De robot kan daarnaast zijn pols 300 graden draaien en zijn hand dus bijna volledig ronddraaien.
Ondanks dat de bewegingen van de HRP-5P veel op die van de mens lijken, maken de afwijkende eigenschappen ook andere houdingen mogelijk. Zo kan de robot veel verder door zijn hurken zakken dan een mens dat kan. Ook is de robot in staat zijn bovenlichaam veel verder te draaien ten opzichte van zijn onderlichaam dan de mens.
Grote objecten manipuleren
De HRP-5P is ten opzichte van zijn voorganger voorzien van een sterkere motor en beter gekoelde aandrijving. Een aantal koppelingen is daarnaast voorzien van meerdere motoren, waardoor het koppel en de maximale snelheid van deze koppelingen is vergroot ten opzichte van voorgangers uit de HRP reeks. Dit maakt het mogelijk grote objecten te manipuleren, waarbij als voorbeeld een multiplex plaat van 1800 x 900 x 12 mm van ongeveer 12 kilogram of een gipsplaat van 1820 x 910 x 10 mm van ongeveer 11 kilogram wordt genoemd.
De robot brengt met behulp van sensoren die zijn ingebouwd in het hoofd van de HRP-5P zijn omgeving continu in de gaten. Door het gebruik van een groot aantal sensoren zijn deze in staat elkaar te compenseren en aan te vullen. Indien het zicht van de robot wordt beperkt door obstakels, kan de robot door meetgegevens te combineren en deze te vergelijken met eerdere metingen toch een goed beeld krijgen van zijn omgeving. Dankzij een neuraal netwerk kan de robot objecten herkennen, zoals gereedschappen die gebruikt kunnen worden voor het uitvoeren van werkzaamheden.
Gipswand bouwen
Om de toepassing van de robot te demonstreren hebben onderzoekers van AIST de HRP-5P getraind om autonoom een gipswand op te bouwen. Dit proces gaat als volgt in zijn werk:
- De robot creëert een driedimensionale kaart van zijn omgeving en brengt objecten in zijn nabijheid in kaart. Vervolgens loopt de robot naar zijn werkbank toe om aan de bouw van de wand te beginnen
- Aangekomen bij de werkbank pakt de robot een gipsplaat oppakt van een stapel gipsplaten die klaar ligt
- De robot vervoert deze gipsplaat naar de muur en brengt hierbij zijn omgeving in kaart
- De gipsplaat wordt door de robot in de juiste positie gebracht en tegen het frame van de muur geplaatst
- De robot bevestigt de gipsplaat met behulp van schroeven aan de muur en houdt de gipsplaat met één hand stabiel
Hoe dit er in de praktijk uitziet is in de onderstaande video te zien.
Personeelstekort opvangen
Met de HRP-5P hoopt AIST een antwoord te kunnen bieden op afnemende geboortecijfers en de toenemende vergrijzing, iets waar niet alleen Japan maar ook Europa mee te kampen heeft. Naar verwachting zullen allerlei sectoren waaronder de bouw hierdoor te maken krijgen met personeelstekorten. Door robots werkzaamheden te laten overnemen van de mens hoopt het instituut dit tekort te kunnen opvangen. Doordat humanoïde robots dezelfde vorm hebben als de mens en handelingen op vergelijkbare wijzen kunnen uitvoeren kunnen deze robots worden ingezet zonder dat de werkomgeving hierop hoeft worden aangepast. Dit vereenvoudigt de inzet van de robots.
Hydrian X
AIST is overigens niet de enige partij die met behulp van robots personeelstekorten in de bouw wil opvangen. Zo werkt het Australische Fastbrick Robotics al enige tijd aan de Hadrian X, een metselrobot die ruim 1.000 bakstenen per uur kan metselen en bakstenen automatisch voorzien van specie. Met deze robot wil het bedrijf het groeiende tekort aan metselaars in het noorden van Australië opvangen. Caterpillar heeft twee miljoen dollar geïnvesteerd in het bedrijf.
De Hydrian X bestaat uit een vrachtwagen voorzien van een robotarm van maar liefst 30 meter lang. Dankzij deze robotarm kan de robot bakstenen op nagenoeg iedere locatie op een te bouwen muur plaatsen zonder dat de vrachtwagen hiervoor verplaatst hoeft te worden. De robot kan via de weg naar iedere gewenste locatie worden gereden en kan volgens Fastbrick Robotics in slechts twee dagen een volledig woning metselen. Deze woning wordt gebouwd aan de hand van een 3D-model, waardoor het niet nodig is de robot tijdens het metselen instructies te geven.
Woningen 3D-printen
Daarnaast zet Dubai al enige tijd in op het 3D-printen van woningen. Het eerste gebouw dat volledig met een 3D-printer is gebouwd werd in 2016 al geopend. Dit gebouw is opgebouwd uit verschillende modules die met behulp van additieve productie zijn geproduceerd. Deze modules zijn vervolgens op locatie met behulp van een hijskraan geassembleerd tot het uiteindelijke gebouw.
Het emiraat streeft ernaar in 2025 een kwart van alle nieuwe gebouwen met behulp van additieve productie is geproduceerd. Deze ambitie is onderdeel van een roadmap genaamd ‘Dubai Future Foundation’, dat van de Verenigde Arabische Emiraten (VAE) en Dubai in 2030 de 3D-print hub van de wereld moet hebben gemaakt.
Auteur: Wouter Hoeffnagel
Bron: National Institute of Advanced Industrial Science and Technology
Bron: Fastbrick Technologies
Bron: Bron: World Economic Forum
Bron: Dubai Future Foundation
Hoe kunnen we kennis van toeleveranciers maakindustrie beter benutten?
Als toeleverancier aan de maakindustrie vind ik het uiteraard interessant om te volgen in wat voor soort installaties onze producten terecht komen en welke eindgebruikers deze processystemen uiteindelijk toepassen. Een mooi voorbeeld is een kaas-pasteur voor de zuivelindustrie. Laatst is er weer één opgeleverd die is uitgerust met CIP-reinigbare monsternamekranen uit ons assortiment.
In een pasteur vindt een hittebehandeling plaats waardoor ziekteverwekkende bacteriën en het grootste deel van de schadelijke bacteriën worden gedood. Een proces waarbij je uiteraard voor 100% op de uitslag van je productmonsters moet kunnen vertrouwen. En dat kan ook, mits de monsternamekranen op de juiste manier worden toegepast en gereinigd.
Monsternamevraagstuk
Hier kom je wat mij betreft op het punt dat onze rol als leverancier verder gaat dan sec het leveren van procesonderdelen. Ik zal uitleggen wat ik bedoel aan de hand van een voorbeeld. Mijn collega Anne Marijke Zwarts, specialist in monsternametechnologie, komt nog wel eens in contact met zuivelbedrijven die op zoek zijn naar de leverancier van de monsternamekranen in hun productiesystemen omdat ze een technische vraag hebben.
Neem bijvoorbeeld het bemonsteren van de luchttoevoer in een zuivelproces. Deze lucht wordt gebruikt om tanks onder druk te zetten en te legen. Als de analyse van de monsters onverwachte uitslagen oplevert, vraagt men Anne Marijke hoe hier het beste een verbetertraject kan worden ingezet. Punt is dat de werking van de monsternamekranen dan wel in orde is, maar dat er onduidelijkheden zijn over het reinigen van de kranen met CIP (Cleaning In Place) of SIP (Sterilization In Place). Anne Marijke geeft hierover dan gerichte trainingen en advies.
Specialisten
Dit is een monsternamevoorbeeld, maar ook bij andere technische disciplines zien wij de kennisvraag toenemen. De vergrijzing binnen de industrie speelt hierbij zeker een rol. Toeleveranciers aan de maakindustrie hebben veel specialistische kennis in huis die eindgebruikers van pas kan komen. Vandaar dat wij steeds vaker de handen ineen slaan met betrokken partijen en seminars organiseren over een specifiek thema binnen een bepaalde branche. Tijdens zo’n training gaan we echt de diepte in, we zijn tenslotte met vakgenoten onder elkaar. Vaak zijn er specialisten uit het buitenland aanwezig om presentaties te houden.
Verantwoordelijk
Omdat het voor alle betrokken partijen (toeleveranciers aan maakindustrie, de machinebouwer zelf, de eindgebruiker van de installatie en uiteindelijk de consument) van belang is dat installaties optimaal en veilig in gebruik zijn, draait het volgens mij om samenwerken en kennis delen. De toegevoegde waarde die leveranciers van technische procesonderdelen hierbij kunnen bieden, is groter dan men misschien denkt. Ook de technische handelsbedrijven zelf realiseren zich niet altijd hoeveel kennis er in de organisatie aanwezig is. Nog lang niet alle specialisten zijn zover dat ze voor een groep gaan staan en hun kennis delen. Maar als we het technische kennisniveau in de Nederlandse industrie hoog willen houden, moeten wij toeleveranciers zeker onze verantwoordelijkheid nemen.
Met een 'robothuid' kan ieder flexibel object worden omgetoverd tot robot (video)
Robots zijn in staat een groot aantal taken uit te voeren. Voor veel van deze taken is het aanschaffen van een robot gezien het relatief hoge prijskaartje echter geen optie. Een ontwikkeling van de Yale University kan uitkomst bieden. Onderzoekers van de universiteit hebben een robothuid ontwikkeld waarmee alledaagse flexibele objecten kunnen worden omgebouwd tot robot, die vervolgens eenvoudige taken kan uitvoeren.
Al langer zien we dat robots flexibeler worden en voor steeds meer doeleinden inzetbaar zijn. Denk hierbij aan collaboratieve robots die relatief eenvoudig nieuwe taken kunnen worden aangeleerd en hierdoor ook voor productie in kleine oplages ingezet kunnen worden. Collaboratieve robots zijn hiermee veel flexibeler dan traditionele industriële robots, die door programmeurs moeten worden geprogrammeerd.
OmniSkin
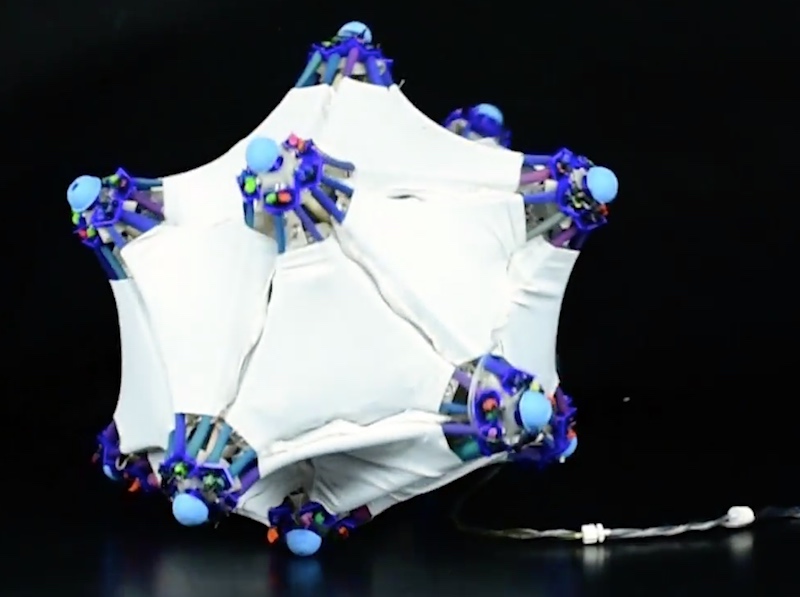
Een nieuwe technologie van de Yale University maakt robots echter nog flexibeler. Onderzoekers van de universiteit hebben ‘robothuiden’ ontwikkeld waarmee gebruikers zelf eigen robotsystemen kunnen ontwikkelen. Deze huiden – die OmniSkins wordt genoemd – zijn gemaakt van een elastisch materiaal en bevat onder meer actuatoren en sensoren. De huiden kunnen op ieder willekeurig flexibel object worden geplaatst, zoals een schuimrubberen buis of een knuffel. Dit object verandert hiermee in een robot.
Deze robot kan allerlei relatief eenvoudige taken uitvoeren, afhankelijk van de eigenschappen van het object en de wijze waarop de OmniSkins worden toegepast. Zo kan een robothuid worden ontwikkeld om een object voort te laten bewegen of een huid om een object andere objecten vast te laten pakken. Het is ook mogelijk verschillende OmniSkins te combineren om complexere bewegingen mogelijk te maken. Denk hierbij aan meerdere robothuiden die ieder een andere beweging maken om een object te laten voortbewegen. Een ander voorbeeld is een huid die een object in staat stelt andere objecten vast te pakken.

Veel toepassingen
Ondanks dat de robotische huiden niet met een specifieke toepassing voor ogen izijns ontwikkeld, voorzien de onderzoekers uiteenlopende toepassingen. De universiteit heeft verschillende prototypes van de robothuid ontwikkeld om toepassingen te demonstreren. Denk hierbij aan schuimrubberen cilinders die zichzelf als een worm voortbewegen, een apparaat met een grijper dat objecten kan verplaatsen en een shirt-achtige wearable apparaat dat gebruikers helpt hun houding te verbeteren.
De kracht van de OmniSkins is de flexibiliteit die zij bieden, stelt hoogleraar Machinebouw en Materiaalkunde Rebecca Kramer-Bottiglio van de Yale University. Zo kunnen meerdere huiden worden gecombineerd en kan de werking van huiden worden aangepast door componenten zoals sensoren anders te programmeren. Dit stelt gebruikers in staat ter plekke een multifunctionele robot te ontwikkelen om handelingen te automatiseren.
Ontworpen in samenwerking met NASA
De technologie is ontworpen in samenwerking met NASA, dat in de ruimte toepassingen voorziet. Zo is het vervoer van materiaal naar ruimtestations erg kostbaar, waardoor het geen optie is voor allerlei taken verschillende robots te gebruiken. Met behulp van de robothuid kunnen astronauten ter plekke een robot bouwen om een bepaalde taak uit te voeren. Zodra deze taak is afgerond, kan de robot uit elkaar worden gehaald en de robothuid voor een andere robot worden gebruikt. De OmniSkins kunnen uitgevouwen en daardoor plat worden vervoerd, waardoor zij weinig ruimte in beslag nemen en relatief goedkoop kunnen worden vervoerd.
“Een van de belangrijkste dingen die ik in overweging heb genomen is het belang van multifunctionaliteit, zeker voor het verkenningsmissie ver in het heelal waar de omgeving onvoorspelbaar is”, zegt Kramer-Bottiglio. “De vraag is: hoe bereid je je voor op onbekende onzekerheden?” Door zelf robots te bouwen kunnen astronauten bijvoorbeeld taken die zij onverwachts moeten uitvoeren eenvoudiger automatiseren.
Componenten 3D-printen
De robothuid wordt nog verder ontwikkeld. Zo wil Kramer-Bottiglio de prototypes die zijn ontwikkeld verder gaan stroomlijnen en worden mogelijkheden onderzocht om componenten van de robothuid te 3D-printen. Ook dit kan relevant zijn voor gebruik in de ruimte. Zo zouden astronauten benodigde componenten om nieuwe robothuiden te bouwen ter plekke kunnen printen, wat de flexibiliteit van de technologie verder vergroot.
Auteur: Wouter Hoeffnagel
Bron: Yale University
Bron foto: Pixabay / qimono
Stijvere scheepsromp met schokabsorberend materiaal
Onderzoekers van de Universidad Politécnica de Madrid hebben een nieuwe technologie ontwikkeld op basis van composietmaterialen en visco-elastische lagen die de weerstand van de romp van hogesnelheid-vaartuigen verhoogt en deze tegelijkertijd veiliger maakt.
Een speedboot die met grote klappen over het water lijkt te vliegen – je hebt ze misschien wel eens voorbij zien gaan tijdens een strandvakantie of in een spannende actiefilm. De schadelijke gevolgen van die klappen kunnen aanzienlijk zijn; zowel voor het vaartuig zelf als voor de passagiers die het vervoert.
In tegenstelling tot grote vrachtschepen die dóór het water varen en het water daarbij verplaatsen, is er ook een aantal schepen die zich óver het wateroppervlak vaart. Aangezien deze geen water verplaatsen, kunnen deze vaartuigen ook met veel grotere snelheid varen. De speedboot is daar misschien wel het beste voorbeeld van. Naarmate de snelheid toeneemt richt de steven zich echter op uit het water om vervolgens regelmatig terug te klappen op het wateroppervlak. Omdat de waterspiegel zich bij die snelheden gedraagt als een soort muur heeft de romp van het vaartuig het daarbij zwaar te verduren. Dit fenomeen staat ook wel bekend als het klappen van de romp en vormt bij hogesnelheid-vaartuigen een serieus probleem.
Het regelmatig klappen van de romp zorgt voor beschadigingen aan de boot, met name wanneer deze gemaakt zijn van niet-organische vezels (glas, koolstof) en samengestelde polymeren (polyester, vinyl). Deze composietmaterialen zijn weliswaar licht maar ook gevoeliger voor inslag dan bijvoorbeeld de metalen variant ervan. Als gevolg van de klappen op het water wordt het rompmateriaal fragieler en ontstaan miniscule scheurtjes.
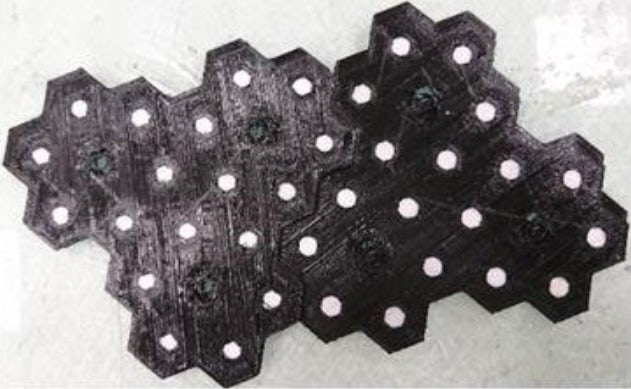
Om de constructie van hogesnelheid-vaartuigen te beschermen, ontwikkelden Spaanse onderzoekers een nieuw systeem waarbij dunne visco-elastische lager tussen de lagen tussen het composietmateriaal zijn aangebracht. Hiermee kan energie worden opgevangen en afgevoerd. Die energie komt vrij wanneer de romp van het vaartuigen steeds op het wateroppervlak ‘klapt’. De laag is opgebouwd uit gewone hexagonen van een stijf polymeer die ingepakt zijn in een licht en visco-elastisch materiaal van een speciaal ontwikkelde rubbersoort. Uit onderzoek blijkt dat de reparatiefrequentie van beschadigde scheepsrompen met een factor drie afneemt wanneer de nieuwe technologie wordt toegepast. Het gebruik van het materiaal voor scheepsrompen draagt niet alleen bij aan een langere levensduur maar zorgt ook voor verbetering van de veiligheid van passagiers. Scheepswerven, scheepeigenaren en classificatiebureaus hebben inmiddels belangstelling getoond voor de geleidelijke introductie van deze nieuwe ontwikkeling.
Ford pleit voor gestandaardiseerde communicatie zelfrijdende auto's met weggebruikers
Om autonome voertuig veilig samen met andere weggebruikers van de openbare weg gebruik te laten maken, is het noodzakelijk de communicatie vanuit zelfrijdende auto's te standaardiseren. Dit stelt autofabrikant Ford, dat verwacht dat dergelijke standaardisatie kan helpen voetgangers, automobilisten en andere weggebruikers meer vertrouwen te laten krijgen in autonome voertuigen.
Zelfrijdende voertuigen maken autonoom beslissingen in het verkeer en kunnen bijvoorbeeld besluiten van rijbaan te wisselen, te keren, te versnellen of juist af te remmen. De beoordelingen die dergelijke voertuigen maken worden gebaseerd op onder andere gegevens die worden verzameld met sensoren en analyses van deze data met behulp van algoritmes. Autonome voertuigen kunnen hierbij andere conclusies trekken dan de mens, wat het gedrag van zelfrijdende auto’s onvoorspelbaar kan maken.
Vertrouwen van weggebruikers winnen
Ford werkt al langer aan een interface die moet helpen autonome voertuigen samen met andere weggebruikers veilig van de weg gebruik te maken. Een dergelijk systeem moet de intenties van zelfrijdende auto’s communiceren naar andere weggebruikers, zodat zij beter kunnen anticiperen op het gedrag van de voertuigen. Een dergelijke systeem kan volgens Ford niet alleen de veiligheid op de weg, maar helpt ook het vertrouwen van andere weggebruikers te winnen.
“In de reis naar de ontwikkeling en uitrol van zelfrijdende voertuigen, wordt al snel de focus gelegd op de klanten die in deze voertuigen zullen rijden. Bij Ford willen we het vertrouwen van alle betrokken partijen winnen, ook van andere weggebruikers en gemeenschappen waarin deze voertuigen zullen opereren. Om deze technologie een succes te laten worden, is het van kritiek belang dat deze wordt geïntegreerd in de maatschappij op een manier die iedereen het vertrouwen geeft”, schrijft John Shutko, Human Factors Technical Specialist op het gebied van zelfrijdende voertuigen bij Ford.
Industriestandaard ontwikkelen
Ford roept ontwikkelaars, autofabrikanten en technologiebedrijven die werken aan Level 4 zelfrijdende voertuigen de samenwerking aan te gaan en ideeën te delen voor een industriestandaard voor het communiceren van de intenties van zelfrijdende voertuigen. Een Level 4 autonoom voertuig neemt volgens de definitie van kenniscentrum CROW alle operationele taken en een deel van zowel de tactische als strategische rijtaken over. De bestuurder kan op dit niveau zijn aandacht op andere zaken richten en hoeft niet langer in staat te zijn de controle over het voertuig niet langer op ieder willekeurig over te nemen.
Ford noemt het van kritiek belang dat er wereldwijd één standaard wordt geïntroduceerd voor dergelijke communicatie. Dit is noodzakelijk om zeker te stellen dat ieder persoon ongeacht land of leeftijd de signalen kan begrijpen. Om de ontwikkeling van een dergelijke standaard mogelijk te maken wil het bedrijf een Memorandum of Understanding aangaan met andere partijen die betrokken zijn bij de ontwikkeling van zelfrijdende auto’s.
Experiment met lichtbalk
De autofabrikant voerde eerder een experiment uit waarbij een Ford Transit Connect werd voorzien van een lichtbalk aan de bovenzijde van de vooruit. Via deze lichtbalk werden de intenties van het voertuig gecommuniceerd naar weggebruikers. Tijdens dit experiment reed het gebruikte voertuig overigens niet daadwerkelijk autonoom, maar werd bestuurd door een menselijke bestuurder die onzichtbaar was gemaakt.
Ook Mitsubishi Electric werkt aan een dergelijk systeem: het Safe and Secure Lighting systeem. Dit systeem projecteert signalen op zowel de weg als op ingebouwde schermen in de auto. Indien het voertuig bijvoorbeeld achteruit gaat rijden worden andere weggebruikers met behulp van pijlen op de weg voor deze beweging gewaarschuwd. Het systeem kan volgens Mitsubishi Electric niet alleen de intenties van zelfrijdende auto’s communiceren naar andere weggebruikers, maar ook die van menselijke bestuurders.
Tot slot presenteerde Mercedes-Benz Vans afgelopen maand een autonoom en elektrisch aangedreven conceptvoertuig genaamd Vision URBANETIC. Dit voertuig kan worden voorzien van uitwisselbare carrosserieën, waarmee de Vision URBANETIC kan worden geconfigureerd voor vervoer van mensen of juist goederen. Op de voorzijde van het conceptvoertuig is een groot scherm gemonteerd dat voetgangers via signalen laat zien dat het voertuig hun aanwezigheid heeft geregistreerd. Daarnaast zijn aan de zijkant honderden kleine lichtunits geplaatst die worden ingezet om een soort schaduw te creëren van mensen die zich in de directe nabijheid van het voertuig bevinden.
Auteur: Wouter Hoeffnagel
Bron: Ford

Smogreductie bespaart Europese burgers €183 miljard in 2025
Een ingrijpend nieuw onderzoek dat vandaag is gepubliceerd door InnoEnergy, Europa’s drijvende kracht achter duurzame energie en ondersteund door de EIT, onthult dat EU-burgers € 183 miljard kunnen besparen door de komende zeven jaar innovatieve smogverminderende technologieën te implementeren.
Een ingrijpend nieuw onderzoek dat vandaag is gepubliceerd door InnoEnergy, Europa’s drijvende kracht achter duurzame energie en ondersteund door de EIT, onthult dat EU-burgers € 183 miljard kunnen besparen door de komende zeven jaar innovatieve smogverminderende technologieën te implementeren.
Het rapport, getiteld Clean Air Challenge en opgesteld in samenwerking met Deloitte, is een reactie op de conclusies van de Europese Commissie dat smog wellicht verantwoordelijk is voor 1 op de 10 gevallen van mensen die wereldwijd te vroeg overlijden en dat smog de EU tussen 2018 en 2025 een verbijsterend bedrag van € 475 miljard zal kosten.
Profiteren
Het rapport werd gelanceerd tijdens een bijeenkomst van vooraanstaande politici en beleidsmakers in Brussel en werpt een diepgaande blik op het probleem van de luchtkwaliteit in het hele Europese continent. Het besteedt bovendien extra aandacht aan concrete, innovatieve oplossingen voor vervoer en verwarming om Europese burgers te beschermen tegen vervuiling en de invloed daarvan op de gezondheid.
Spreker tijdens de bijeenkomst Jerzy Buzek, voorzitter van de EP-Commissie Industrie, onderzoek en energie en voormalig voorzitter van het Europees Parlement, zegt: “Smog is een van de meest cruciale volksgezondheidsproblemen van de eeuw en verantwoordelijk voor het vroegtijdig overlijden van 1 op de 10 mensen wereldwijd en 400.000 mensen per jaar in Europa. Het Clean Air Challenge-rapport biedt praktische oplossingen die de gezondheid van onze burgers kunnen helpen verbeteren en waarvan de maatschappij als geheel kan profiteren. We moeten ze zonder uitstel overal in de EU gaan implementeren.”
Halt toe roepen
Diego Pavia, CEO bij InnoEnergy, zegt: “Het is shockerend dat smog in deze tijd nog een dergelijk risico levert voor de gezondheid in onze gemeenschappen. Afgezien van de enorme economische kosten is er met de technologie die we tot onze beschikking krijgen, geen reden waarom burgers niet schone lucht zouden kunnen inademen. Bij InnoEnergy pakken we problemen graag direct aan en dit vormt geen uitzondering. Niet alleen stellen we verder onderzoek beschikbaar om het probleem beter te begrijpen en praktische oplossingen te identificeren, maar we zoeken ook actief naar kansen om investeringsmogelijkheden en bredere ondersteuning te bieden aan ambitieuze bedrijven met passie en een plan om smog een halt toe te roepen.”
Irena Pichola, partner en manager van Sustainability Consulting Central Europe bij Deloitte, verklaart: “We moeten niet vergeten dat mensen op verschillende manieren schade ondervinden van een slechte luchtkwaliteit. Er zijn bijvoorbeeld enorme regionale verschillen in de oorzaken en gevolgen van smog, waarbij de meeste smog in het westen van Europa door vervoer komt en vervuiling in het oosten door verwarming. Maar zoals genoemd in het rapport, worden waar je ook kijkt jongeren er het meest door getroffen. De verhoging van 100 eenheden fijnstof (PM) betekent een verlaging van de gemiddelde levensverwachting van 2 tot 3 jaar voor kinderen van 5 jaar. We zijn er trots op samen met InnoEnergy te zoeken naar oplossingen voor dit immens belangrijke probleem.”
Hardt, een Nederlandse start-up, is bezig met het ontwikkelen van Europa’s eerste door zonne-energie aangedreven hyperloop; een vervoerssysteem met hoge capaciteit dat steden en landen met elkaar verbindt en passagiers en goederen kan vervoeren. Na implementatie kunnen hyperloops wellicht een deel van het lucht- en grondvervoer vervangen. InnoEnery is een van de investeerders van Hardt.
Bron: InnoEnergy