
Autonome vorkheftruck kan veilig samenwerken met mensen
Onderzoekers werken aan een vorkheftruck die in magazijnen autonoom goederen moet kunnen verpakken, palletiseren en vervoeren. De robots moeten veilig kunnen samenwerken met mensen die in dezelfde omgeving aanwezig zijn. Ook moeten zij zelflerend worden, waardoor zij zich kunnen aanpassen aan een veranderde omgeving.
Het gaat om het project Intra-Logistics with Integrated Automatic Deployment (ILIAD), dat een subsidie van 7 miljoen euro heeft ontvangen van het Horizon 2020 programma van de Europese Unie (EU). Het project wordt uitgevoerd door een consortium dat bestaat uit zowel universiteiten als bedrijven. De Britse University of Lincoln, Italiaanse University of Pisa, Duitse Leibniz University, Bosch, Kollmorgen Automation, ACT Operations Research, Logistic Engineering Services en Orkla Foods zijn bij het project betrokken. Het project staat onder leiding van de Zweedse Örebro University.
Flexibel systeem voor intralogistiek
Het project is gericht op intralogistiek, een vorm van logistiek dat zich op het eigen terrein van een bedrijf afspeelt. De intralogistieke dienstverlening moet snel kunnen inspelen op veranderende marktbehoeften, onvoorziene trends en de steeds kortere levenscycli van producten. Dit stelt nieuwe eisen aan intralogistieke systemen, die flexibeler, betrouwbaarheid en sneller inzetbaar moeten zijn.
Al langer zijn geautomatiseerde systemen voor magazijnen beschikbaar. Zo heeft Amazon meer dan 45.000 geautomatiseerde robots in gebruik in meer dan 20 fulfilmentcenters ter wereld. Deze robots zijn ontwikkeld door het bedrijf Kiva Systems, dat in 2012 werd overgenomen door Amazon. In de fulfilmentcenters staan verhoogde kasten waarin producten worden opgeslagen. De robots kunnen zichzelf onder deze kasten positioneren, de volledige kast optillen en deze vervoeren naar een menselijke medewerker. Werknemers halen vervolgens de juiste producten uit de kast en pakken deze in. Het consortium achter ILIAD wijst erop dat veel van dit soort bestaande systemen echter speciale infrastructuur vereisen. In het geval van Amazon zijn dit bijvoorbeeld de speciale kasten die door de robots kunnen worden opgetild.
Geen speciale infrastructuur
Met ILIAD speelt het consortium hierop in. ILIAD heeft als doel een slimme vorkheftrucks te ontwikkelen die autonoom kunnen opereren in magazijnen en pakhuizen, zonder dat hiervoor speciale infrastructuur nodig is of een magazijn hoeft worden aangepast. De robots moeten veilig kunnen samenwerken met mensen en worden voor dit doeleinde uitgerust met zowel vision technologie als kunstmatige intelligentie. Deze combinatie stelt de robots in staat de aanwezigheid van mensen te detecteren en hun bewegingen te voorspellen, zodat de robots autonoom een veilige route kunnen plannen. De robots gaan hun intenties met behulp van visuele signalen communiceren met mensen, wat voorkomt dat mensen worden verrast door bewegingen of handelingen van de vorkheftrucks.
Dankzij het gebruik van kunstmatige intelligentie moeten de robots daarnaast in staat zijn zich aan te passen aan een veranderende omgeving. De robots optimaliseren zichzelf continu op basis van informatie die wordt verzameld met behulp van de vision systemen. Dit betekent in de praktijk onder meer dat de opstelling van bijvoorbeeld stellingen kan worden veranderd, zonder dat de vorkheftrucks handmatig geherprogrammeerd hoeven te worden. Door de slimme werking van de vorkheftrucks moet het daarnaast mogelijk zijn individuele robots op ieder gewenst moment uit het magazijn te verwijderen of hier juist aan toe te voegen, zonder dat dit handmatige aanpassingen aan de configuratie van de robots vereist.
Doelstellingen
Het consortium achter ILIAD stelt zichzelf als doel om:
- een vloot van heterogene robots te ontwikkelen die zelfstandig aan de slag kunnen gaan in een magazijn;
- robots te ontwikkelen die zichzelf gedurende hun volledige levensduur zelfstandig optimaliseren;
- de manipulatie van een vloot van robots mogelijk te maken via mobiele apparaten;
- de vorkheftrucks efficiënt en veilig te laten samenwerken met mensen die zich in dezelfde ruimte bevinden;
- efficiënt fleet management met formele garanties mogelijk te maken.
Het project is in januari 2017 van start gegaan en heeft een looptijd van 48 maanden.
Auteur: Wouter Hoeffnagel
Bron: University of Lincoln
Bron: ILIAD
Foto door: Chris Vaughan Photography / University of Lincoln
Meer nieuws
KSB klepafsluiters integreren in energiemanagement-systemen
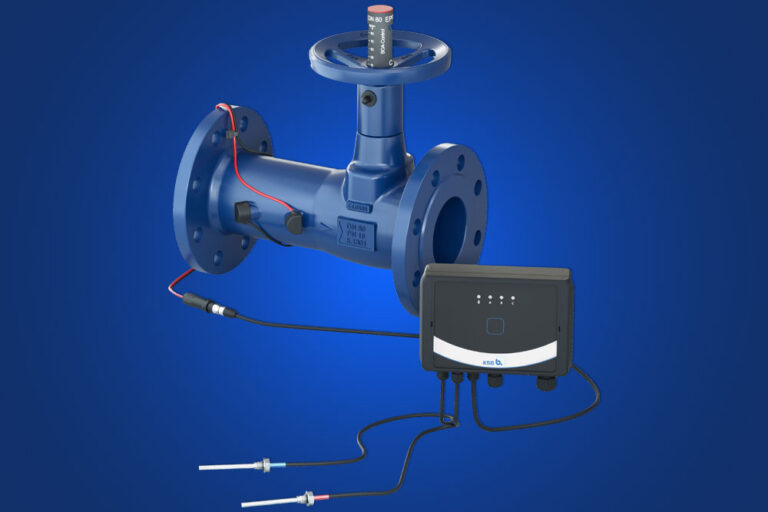
(productnews)
Bouw & Constructie / 18-03-2025
Lees meerOnderzoekers van QIA ontwikkelen eerste besturingssysteem voor quantumnetwerken

(productnews)
High tech / 17-03-2025
Lees meerFoundation model van Backflip AI vereenvoudigt omzetten van 3D-scan in 3D-model
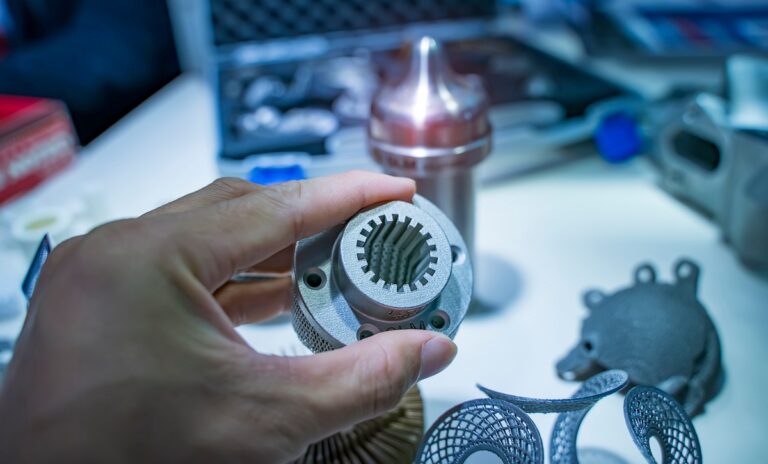
(productnews)
High tech / 17-03-2025
Lees meerNVDE over onderzoek netkosten: investeringen noodzakelijk voor toekomstbestendige economie
