
Uiterst gevoelige robotgrijper: pneumatiek is niet nodig
Krachtgevoelig, dynamisch, energie-efficiënt en met een scala aan toepassingen – dat zijn de kenmerken van de nieuwe robotgrijper van het Fraunhofer Instituut voor Mechatronisch Systeemontwerp IEM. Hij kan kwetsbare voorwerpen van de ene productiestap naar de andere brengen zonder ze te beschadigen. De robotgrijper is speciaal ontworpen voor de levensmiddelenindustrie, waar een zorgvuldige behandeling van breekbare producten verspilling helpt voorkomen. De elektrische aandrijving maakt dure pneumatiek overbodig.
Het automatisch transporteren, sorteren en verpakken van breekbare levensmiddelen is niet eenvoudig. De robot moet de producten snel en dynamisch behandelen. Of het nu gaat om eieren, meringues, gehaktballen, koekjes, pralines, donuts of iets anders, zonder ze te beschadigen met druksporen of andere oneffenheden. Onderzoekers van het Fraunhofer IEM in Paderborn ontwikkelden een robotgrijper voor gebruik in de levensmiddelenindustrie. Dit gebeurde in het kader van een door de deelstaat Noordrijn-Westfalen gefinancierd project. Fraunhofer presenteerde de robotgrijper op de Hannover Messe 2023 als onderdeel van een cobot-werkstation, dat met chocolade bedekte marshmallows verplaatst zonder hun kwetsbare coating te beschadigen.
Twee, drie of vier vingers
Het grijpersysteem is in te stellen met twee, drie of vier vingers en is aan te passen voor verschillende taken en doeleinden. Dat betekent dat men het ook kan gebruiken voor de geautomatiseerde behandeling van andere kwetsbare producten zoals glaswerk. “De vingers hebben een plastic, zachte en flexibele coating. Daardoor houden ze een delicate greep op fragiele materialen en beschadigen ze deze niet.
Dynamische grijper
“De robotgrijper is ook uiterst dynamisch en is eenvoudig in productieprocessen te integreren. Hij behoudt te allen tijde het vereiste evenwicht tussen snelheid en gevoeligheid”, aldus Dr. Christian Henke. Hij is hoofd van de afdeling wetenschappelijke automatisering bij Fraunhofer IEM. De nauwkeurige en dynamische besturingstechnologie maakt gerichte vingerbewegingen en complexe productbesturing mogelijk. In de vingers geïntegreerde sensoren bepalen de vereiste hoeveelheid druk.
Elektrisch
Het bijzondere voordeel van het systeem: de grijper wordt niet pneumatisch, maar elektrisch bediend. Zo werkt hij energiezuinig en maakt hij gebruik van bestaande stroomaansluitingen. “Tot nu toe werden grijpersystemen pneumatisch aangedreven. Dat kost veel energie. Lucht onder druk genereren is minder efficiënt, nog minder door frequente lekkages in de leidingen”, legt de ingenieur uit.
Samenwerking mens en robot
De actieradius van het systeem kan worden uitgebreid met een lineaire as, dat wil zeggen een horizontale baan. Daartoe wordt de robotgrijper gemonteerd op een verticale hefkolom, die aan de lineaire as is bevestigd. De grijper is geschikt voor een veilige samenwerking tussen mens en robot dankzij zijn sensorgebaseerde omgevingsherkenningssysteem. Dit geldt echter niet voor de assen (zowel de lineaire as als de hefkolom).
Geen veiligheidsbarrières nodig
Om de hele werkruimte collaboratief te maken, ontwikkelden de onderzoekers een 360-graden omgevingsherkenningssysteem. Dit systeem bewaakt de volledige lengte en hoogte van de assen. Het kan in de basis van de lineaire as worden geïntegreerd. “Dit multisensorsysteem omvat afstands- en thermografische sensoren. Hiermee kan de hele cobot en asstructuur samenwerken. Dit betekent dat bedrijven geen veiligheidsbarrières hoeven te installeren”, zegt Henke. “De grijper is indien gewenst te combineren met de lineaire as en het multi-sensorsysteem. Ook kan hij alleen worden gebruikt.” De eerste tests zijn succesvol verlopen en het Fraunhofer IEM-team zoekt nu partners om de robotgrijper op de markt te brengen.
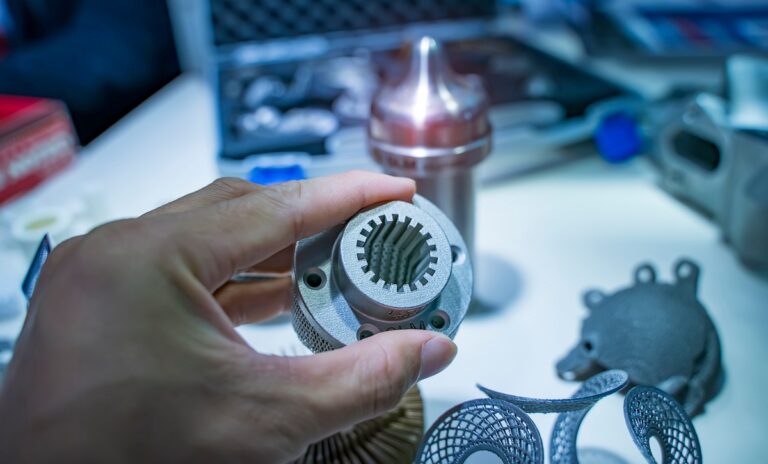
Beeld: Fraunhofer IEM doet onderzoek naar intelligente grijpsystemen (Foto: Fraunhofer IEM/Wolfram Schroll)
Lees ook: Onderzoek toont opmars cobots bij MKB
Meer nieuws
KSB klepafsluiters integreren in energiemanagement-systemen
(productnews)
Bouw & Constructie / 18-03-2025
Lees meerOnderzoekers van QIA ontwikkelen eerste besturingssysteem voor quantumnetwerken

(productnews)
High tech / 17-03-2025
Lees meerFoundation model van Backflip AI vereenvoudigt omzetten van 3D-scan in 3D-model
(productnews)
High tech / 17-03-2025
Lees meerNVDE over onderzoek netkosten: investeringen noodzakelijk voor toekomstbestendige economie
