

Urban Air Mobility (UAM) opent nieuwe mogelijkheden op het gebied van goederenvervoer. Als een deel van het stedelijk verkeer de lucht in gaat, biedt het daarnaast compleet nieuwe benaderingen met betrekking tot duurzame mobiliteitsoplossingen. In het Fraunhofer Albacopter Lighthouse Project houden zes Fraunhofer instituten zich bezig met de technische en sociale aspecten van UAM. Onder leiding van het Fraunhofer Institute for Transportation and Infrastructure Systems IVI ontwikkelden onderzoekers een vliegtuig dat op een bijzonder efficiënte manier zweeft – geïnspireerd door de albatros.
Voor UAM gelden strenge eisen voor vliegtuig- en systeemtechnologie, waaronder veilige, stille VTOL-systemen (vertical take-off and landing/verticaal opstijgen en landen) die ook zeer krachtige aandrijfprestaties kunnen leveren wanneer ze zweven.
De uitdagingen van stedelijk luchttransport
Elektrische multicopters bieden de voordelen van verticaal opstijgen en landen terwijl ze ook voldoen aan veiligheids- en milieucriteria. Hun bereik en laadvermogen zijn echter uiterst beperkt door hun lage efficiëntie en lage energieopslagdichtheid. Grotere vleugels zouden de energiebalans van de vliegtuigen aanzienlijk kunnen verbeteren doordat ze langere tijd kunnen zweven. Aan de andere kant zouden deze vleugels het opstijgen en landen in stedelijke gebieden bemoeilijken. Om UAM financieel levensvatbaar te maken zijn bovendien vliegtuigen die verticaal opstijgen en landen nodig die ook autonoom kunnen vliegen. Hiervoor zijn echter AI-gebaseerde besturingssystemen nodig, die verdere veiligheidsrisico’s met zich meebrengen.
Het is te verwachten dat de UAM in de toekomst diverse toepassingen zal hebben. Denk aan toepassingsscenario’s op het gebied van logistieke drones, luchttaxi’s, reddings- en bewakingsdrones of in landbouwtechnologie.
Het Fraunhofer Albacopter project
In 2021 startte Fraunhofer een project met als doel een vliegend platform te bouwen dat de wendbaarheid van een multicopter kan combineren met de efficiëntie van een zweefvliegtuig. “Met de Albacopter willen we een experimenteel vliegtuig ontwikkelen dat de wendbaarheid van een multicopter combineert met het vermogen van een albatros om lange afstanden te zweven met een minimaal gebruik van energie.” Dat zegt Prof. Matthias Klingner, projectmanager en directeur van Fraunhofer IVI. “Enkele uitzonderlijke kenmerken van dit experimentele zweefvliegtuig zijn onder andere drone-systemen en vrachtcontainers gemaakt van duurzame materialen. Daarnaast bevat het krachtige coaxiale voortstuwingssystemen, krachtige multi-sensor systemen voor het waarnemen van de omgeving en het monitoren van functionaliteiten, en veilige elektronische systemen, inclusief een AI-gebaseerde automatische piloot,” vervolgt hij. Het consortium heeft de complexiteit van dit drone-ontwerp aangepakt door de expertise van de deelnemende instituten te bundelen.
Materiaalkeuze
Het Fraunhofer Institute for Structural Durability and System Reliability LBF ontwierp de structuur en aerodynamische componenten van de Albacopter. Voor de structuur ontwikkelde het Fraunhofer Institute for Chemical Technology ICT pultrusieprofielen. Dat wil zeggen vezelversterkte thermoplasten die werden geïntegreerd in de romparchitectuur van het ruimteframe. Net als de transportcontainers, die zijn gemaakt van biopolymeer hardschuim, is het mogelijk deze systeemcomponenten eenvoudig te recyclen.
Aandrijving Albacopter
“Het efficiënte aandrijvingsontwerp van de Albacopter is gebaseerd op snelle synchrone motoren met meertrapsoverbrenging en hoge vermogensdichtheid,” legt Prof. Frank Henning, directeur van Fraunhofer ICT, uit. Het instituut levert niet alleen de nieuwe voortstuwingstechnologie. Het levert ook een speciale voortstuwingstestopstelling om het testen van eVTOL-voortstuwingssystemen in de vermogensklassen tot 450 kW onder realistische omstandigheden te vergemakkelijken.
Batterijopslagsysteem
“Het ontwerp van het batterijopslagsysteem in Albacopter is gebaseerd op cyclusbestendige secundaire cellen die zeer omkeerbare laad- en ontlaadprocessen garanderen. We hebben gedetailleerd onderzoek gedaan naar de degradatie van de cellen en mogelijke faalmechanismen,” legt prof. Tobias Melz, directeur van Fraunhofer LBF, uit.
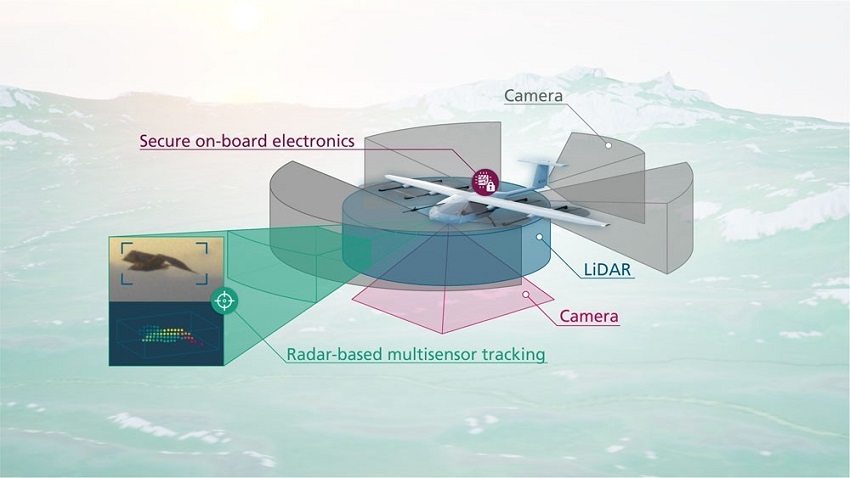
Geavanceerde sensoren en artificiële intelligentie
Robuuste, lichte multi-sensorsystemen met hoge prestaties worden gecombineerd met gevoelige single-photon LiDAR-detectoren. Deze detectoren ontwikkelde het Fraunhofer Institute for Microelectronic Circuits and Systems IMS. Hierdoor wordt 360-graden omgevingsbewaking mogelijk. “De semantische 3D-reconstructie van de omgeving wordt vervolgens uitgevoerd op basis van betrouwbare AI-systemen. In combinatie met intelligente trajectplanning maakt dit innovatieve functies mogelijk zoals autonoom (nood)landen, een van de belangrijkste veiligheidsfuncties van de Albacopter.” Dat zegt Henri Meeß, manager van de Highly Automated Flying-groep bij Fraunhofer IVI.
Totaalsysteem
Samen met een faalveilige RISC-V boordnetwerkarchitectuur, continue monitoring, stabiele 5G-communicatie en een redundante automatische piloot resulteert dit in een totaalsysteem. Een systeem dat voldoet aan de hoge betrouwbaarheidseisen van de UAM. Ondergeschikt aan de automatische piloot is het modelgebaseerde vluchtstandregelsysteem van het Fraunhofer Institute for Mechatronics Design IEM. Dit systeem vertoont stabiel regelgedrag, vooral in de kritieke overgangsfasen tussen zweven en zweefvliegen.
Autonoom vanaf het begin
De Albacopter is bedoeld als demonstratiemodel voor Fraunhofer-technologieën. Naar verwachting zal de vraag hiernaar de komende vijf tot acht jaar sterk toenemen in de snelgroeiende luchtvaart- en logistieke sectoren. Als VTOL-zweefvliegtuig zal de Albacopter beschikbaar zijn voor het testen van verschillende technologieën.
Validatie
De onderzoekers valideren hun ontwerp in meerdere fasen met behulp van geschikte vluchtmodellen, windtunnel experimenten, Iron Bird testopstellingen en systeemsimulaties op een digital win ontwikkeld door het Fraunhofer Institute for Optronics, System Technologies and Image Exploitation IOSB. Een schaalversie van de drone met een spanwijdte van 7 meter en een laadvermogen van ongeveer 25 kilogram zal in de herfst van 2023 worden gelanceerd, terwijl uitgebreide vliegtesten van de Albacopter worden verwacht voor begin 2024.
Bron en openingsfoto: De Albacopter – een kruising tussen een multicopter en een zweefvliegtuig (foto: Fraunhofer IVI)










