Minuscule robot maakt minimaal invasieve chirurgie en gericht afleveren van medicatie mogelijk
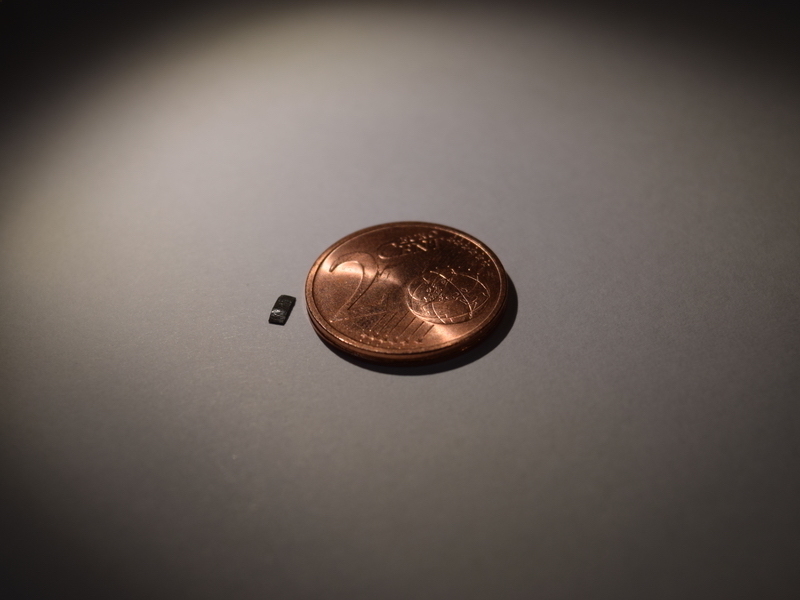
Een nieuwe minuscule robot van slechts vier millimeter groot kan in de toekomst mogelijk worden ingezet voor minimaal invasieve chirurgie en het gericht afleveren van medicatie in het menselijk lichaam. Het gaat om een zogeheten soft robot, een robot die gebouwd is van zachte materialen die geïnspireerd zijn op levende organismen.
De robot is ontwikkeld door wetenschappers van het Duitse Max Planck Institute for Intelligent Systems. De kleine soft robot is in staat in complexe omgevingen – zowel op droge oppervlaktes als in een vloeistof – zich eenvoudig voort te bewegen, wat de robot volgens de wetenschappers uniek maakt. Zo kan de robot lopen, kruipen of rollen over ongelijk terrein, een lading met zich meedragen en zwemmen in vloeistoffen.
Geïnspireerd door kleinschalige dieren met een week lichaam
De wetenschappers zijn voor de ontwikkeling van de robot geïnspireerd door larven van kevers, rupsen en kwallen. “We hebben gekeken naar het fysieke voortbewegingsmechanismen van zowel rupsen met een week lichaam als kwallen en hebben hier inspiratie uit gehaald. Het resultaat is dat onze millirobot een combinatie is van verschillende kleine dieren met een week lichaam, zoals de larf van een kever, een rups, een spermatozoïde en een kwal”, aldus hoogleraar Metin Sitti, directeur van het Physical Intelligence Department van het Max Planck Institute for Intelligent Systems in Stuttgart.
De robot wordt aangestuurd met behulp van magnetische deeltjes die zijn verwerkt in het lichaam van de robot, dat is gemaakt van zacht elastomeer. Indien deze magnetische deeltjes worden blootgesteld aan externe magnetisch velden, verandert het lichaam van de robot van vorm. Dit maakt het niet alleen mogelijk de robot te laten voortbewegen, maar ook om deze bijvoorbeeld van richting te laten veranderen en de robot te laten springen.
Medicijnen op de gewenste locatie afleveren
“In de toekomst kan onze robot medicijnen vervoeren en op de gewenste locatie waar deze het meest nodig zijn afleveren”, aldus Sitti, die hierbij de vergelijking trekt met het afleveren van een pakketje aan de voordeur. De robot kan in het menselijk lichaam worden ‘losgelaten’ door de robot in te slikken of deze via een opening in de huid het lichaam binnen te laten. Vervolgens kan de robot via onder andere het spijsverteringskanaal, de urinewegen of de buikholte naar de gewenste locatie in het menselijk lichaam worden gestuurd.
De robot is al getest is een kunstmatig chirurgisch model van de maag en het weefsel van een kip. Het team van Sitti, dat bestaat uit Wenqi Hu, Guo Zhan Lum en Massimo Mastrangeli, wist de robot in beide gevallen succesvol naar zijn bestemming te loodsen met behulp van externe magnetische velden. Door gebruik te maken van ultrasone beeldtechnologie konden de wetenschappers de bewegingen van de robot tijdens deze procedure volgen. Sitti hoopt dat de robot ooit een standaard wordt in de gezondheidszorg en non-invasieve toegang tot moeilijk bereikbare plekken in het lichaam mogelijk zal maken. “Op dit moment kunnen veel kleine regio’s in het menselijk lichaam niet zonder chirurgie worden bereikt. Het is ons doel deze regio’s op non-invasieve wijze te bereiken en diagnostische of therapeutische handelingen uit te voeren met onze soft robots”, aldus Sitti.
Meer informatie is te vinden bij het wetenschappelijke tijdschrift Nature, waarin een paper van de wetenschappers is gepubliceerd.
Auteur: Wouter Hoeffnagel
Bron: Max Planck Institute for Intelligent Systems (foto)
Bron: Nature
Meer nieuws
NVDE over onderzoek netkosten: investeringen noodzakelijk voor toekomstbestendige economie

(productnews)
Energie / 14-03-2025
Lees meerZweedse accufabrikant Northvolt vraagt faillissement aan

(productnews)
Automotive / 12-03-2025
Lees meerOnderzoekers 3D-printen levende cellen met aangepaste vorm van xolografie

(productnews)
Medisch & Zorg / 11-03-2025
Lees meerESTEC test metalen onderdeel dat in ISS is 3D-geprint
