Nieuwe technologie laat protheses natuurlijkere bewegingen maken
Een nieuwe technologie stelt protheses in staat vloeiendere en natuurlijkere bewegingen te maken, zonder dat hiervoor een langdurig trainingsproces nodig is. Om dit mogelijk te maken onderschept de technologie spiersignalen van patiënten, ontcijfert deze signalen en vertaalt de gegevens naar opdrachten om prothetische armen en handen aan te sturen.
Protheses worden steeds slimmer. Zo zetten moderne prothese technologieën als machine learning in om patronen in de bewegingen van gebruikers te herkennen en op basis hiervan de prothese aan te sturen. Dit betekent in de praktijk dat gebruikers hun prothese moeten trainen om deze te leren om specifieke patronen in hun spiersignalen te herkennen en correct te vertalen naar opdrachten zoals het openen of sluiten van een hand.
Langdurig trainingsproces
“Aansturing via patroonherkenning vereist dat patiënten een langdurig proces doorlopen waarbij zij hun prothese trainen”, legt He Huang, hoogleraar in een gezamenlijk biomedische techniek bij de North Carolina State University en de University of North Carolina Chapel Hill, uit. “Dit proces kan zowel eentonig als tijdrovend zijn.”
Onderzoekers van de North Carolina State University en de University of North Carolina Chapel Hill hebben voor dit probleem een oplossing ontwikkeld. Een nieuwe technologie maakt het mogelijk het leerproces van protheses aanzienlijk te versnellen. “Iedere keer dat je je houding verandert, wijzigen ook de spiersignalen voor het genereren van dezelfde hand- of polsbeweging. Indien uitsluitend wordt vertrouwd op machine learning betekent dit dat het apparaat dezelfde handelingen meerdere malen moet uitvoeren; voor ieder postuur opnieuw, één keer voor situaties waarin je zweterig bent, één keer voor wanneer je dit niet bent, et cetera. Onze aanpak omzeilt dit voor een belangrijk deel.”
Voor deze aanpak hebben de onderzoekers een muscoskeletaal model ontwikkeld op basis van data die is verzameld met elektromyografische sensoren. Deze sensoren zijn op de onderarm van zes vrijwilligers zonder amputaties geplaatst om nauwkeurig in beeld te brengen welke spiersignalen worden verstuurd indien zij allerlei bewegingen uitvoeren met hun polsen en handen. Deze data is vervolgens gebruikt om een generiek model te ontwikkelen dat in staat is deze spiersignalen om te zetten in opdrachten om een prothese aan te sturen. “We wilden ons richten op wat wij al van het menselijk lichaam weten”, aldus Huang. “Dit is niet alleen intuïtiever voor gebruikers, maar ook betrouwbaarder en praktischer.”
Spiersignalen onderscheppen
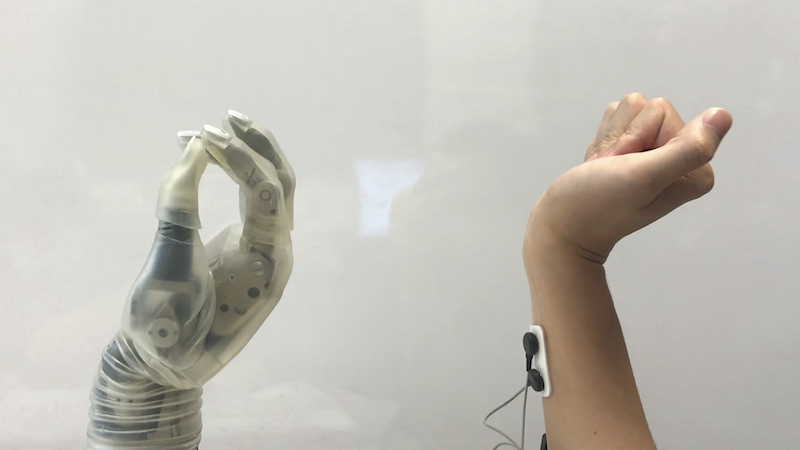
“Indien iemand een hand verliest, zijn diens hersenen nog steeds geprogrammeerd alsof deze hand aanwezig is”, aldus Huang. “Indien iemand dus een glas water wil oppakken, sturen de hersenen hiervoor nog steeds dezelfde signalen naar de onderarm. Wij gebruiken sensoren om deze signalen te onderscheppen en sturen deze data door naar een computer, die deze gegevens aan een virtueel muscoskeletaal model voert. Dit model neemt de positie van de spieren, gewrichten en botten in acht en berekent de bewegingen die zouden plaatsvinden indien de hand en pols nog volledig intact zouden zijn. De resultaten van deze berekeningen worden doorgezet naar de prothetische pols of hand, die de relevante bewegingen in real-time op een gecoördineerde wijze uitvoert. Dit maakt het mogelijk protheses op een vloeiendere en natuurlijkere manier te laten bewegen.”
Het model is door de onderzoekers op de proef gesteld tijdens een reeks experimenten. Gedurende deze testen bleken zowel patiënten met als zonder amputaties het model te kunnen gebruiken om zonder uitgebreide training alle vereiste hand- en polsbewegingen uit te voeren. De onderzoekers wijzen erop dat hun model nog geen klinische testen heeft doorlopen. Zij verwachten dan ook dat het model pas over meerdere jaren commercieel beschikbaar zal zijn.
Op termijn verwachten de onderzoekers dat het model ook voor andere doeleinden kan worden ingezet. “Dit kan ook worden gebruikt om computer-interface apparaten voor gezonde mensen te ontwikkelen”, aldus Huang. “Denk hierbij aan apparaten om mee te gamen of om objecten in CAD-programma’s te manipuleren.”
Onderzoekspaper
Meer informatie en alle bevindingen van de onderzoekers zijn te vinden in de onderzoekerspaper ‘Myoelectric Control Based on A Generic Musculoskeletal Model: Towards A Multi-User Neural-Machine Interface‘, die is gepubliceerd in EEE Transactions on Neural Systems and Rehabilitation Engineering.
Auteur: Wouter Hoeffnagel
Bron: North Carolina State University (foto)
Bron: University of North Carolina Chapel Hill
Bron: Onderzoekspaper ‘Myoelectric Control Based on A Generic Musculoskeletal Model: Towards A Multi-User Neural-Machine Interface’
Meer nieuws
Robot van Deense O-Robotics ruimt straten op

(productnews)
Algemeen / 18-12-2024
Lees meerGrootste fractie Europarlement wil streep voor verbod op verbrandingsmotor

(productnews)
Automotive / 16-12-2024
Lees meerNieuw multifunctioneel zonneraam wekt stroom op door licht te weerkaatsen

(productnews)
Bouw & Constructie / 16-12-2024
Lees meerPBL: ‘Nederland op koers om streefdoel van 35 TWh aan wind- en zonneparken in 2030 te halen’
