MIT-ingenieurs hebben een modulair, onbemand bootje ontworpen dat specifiek bedoeld is voor steden met veel binnenlands water, zoals Amsterdam. Het nieuwe ontwerp volgt op een eerdere uitgebreide test met een prototype in onze hoofdstad.
MIT verwacht dat autonome boten een belangrijke rol gaan spelen in het toekomstige transport binnen waterrijke steden zoals Amsterdam, Bangkok en Venetië. Onderzoekers van MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) hebben in samenwerking met het Senseable City Lab in the Department of Urban Studies and Planning (DUSP), een nieuwe stap gezet naar die toekomst met het het ontwerp van een vloot autonome boten die makkelijk kunnen manouvreren en heel precies te besturen zijn. De boten kunnen ook snel 3D-geprint worden met een goedkope printer. Daardoor wordt massaproductie een stuk makkelijker.
Verkeer ontlasten
De ontworpen boten kunnen zowel personen als goederen vervoeren, waardoor het straatverkeer meer ontlast wordt. In de toekomst stellen de onderzoekers zich ook voor dat de onbemande boten worden aangepast om stadsdiensten ’s nachts uit te voeren, in plaats van tijdens drukke daglichturen, wat de congestie op zowel wegen als kanalen verder vermindert.
“Stel je voor dat een aantal infrastructuurdiensten die gewoonlijk overdag op de weg plaatsvinden – leveringen, afvalbeheer, afvalbeheer – middenin de nacht, op het water, worden uitgevoerd met een vloot van autonome boten”, zegt CSAIL-directeur Daniela Rus , co-auteur van een paper over de technologie die vorige week is gepresenteerd tijdens de IEEE International Conference on Robotics and Automation.
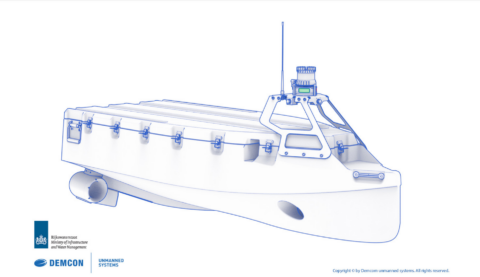
Bovendien kunnen de boten – rechthoekige 4-bij-2-meter waarvan de rompen uitgerustzijn met sensoren, microcontrollers, GPS-modules en andere hardware – worden geprogrammeerd om zichzelf te assembleren tot zwevende bruggen, concertpodia, platforms voor voedselmarkten en andere structuren in een kwestie van uren. “Nogmaals, sommige van de activiteiten die gewoonlijk plaatsvinden op het land, en die verstoring veroorzaken in hoe de stad beweegt, kunnen tijdelijk op het water worden gedaan”, zegt Rus.
De boten kunnen ook worden uitgerust met omgevingssensoren om de wateren van een stad te bewaken en inzicht te krijgen in de stedelijke en menselijke gezondheid.

Beter ontwerp en controle
Het werk werd uitgevoerd als onderdeel van het “Roboat” -project, een samenwerking tussen het MIT Senseable City Lab en het Amsterdam Institute for Advanced Metropolitan Solutions (AMS). In 2016 testten de onderzoekers in het kader van het project een prototype in de grachten van Amsterdam. De boot legde een voorgeprogrammeerd pad vooruit, achteruit en zijwaarts af.
Het ICRA-document bevat een aantal belangrijke nieuwe innovaties: een snelle fabricagetechniek, een efficiënter en wendbaar ontwerp en geavanceerde traceringsvolgalgoritmen die de controle verbeteren, precisie koppelen en vergrendelen en andere taken. Een vrij technisch verhaal, maar wel interessant.
Om de boten te maken, werd eerst een rechthoekige romp met een commerciële printer 3D-geprint en produceerden ze 16 afzonderlijke secties die aan elkaar werden gesplitst. Het afdrukken duurde ongeveer 60 uur. De voltooide romp werd vervolgens afgedicht door verschillende lagen glasvezel te hechten.
Geïntegreerd in de romp zijn een voeding, wifi-antenne, GPS en een minicomputer en microcontroller. Voor een nauwkeurige positionering hebben de onderzoekers een ultrasoon beaconsysteem ingebouwd en real-time kinematische GPS-modules in de open lucht, die localisatie op centimetersniveau mogelijk maken, evenals een module voor inertie-meeteenheden (IMU) die de bocht en hoeksnelheid van de boot bewaakt, tussen andere statistieken.
De boot heeft een rechthoekige vorm, in plaats van de traditionele kajak- of catamaranvormen, om het vaartuig zijdelings te laten bewegen en zich te hechten aan andere boten bij het samenstellen van andere constructies. Een ander eenvoudig maar effectief ontwerpelement was de plaatsing van de boegschroef. Vier stuwraketten worden in het midden van elke zijde geplaatst, in plaats van op de vier hoeken, waardoor voorwaartse en achterwaartse krachten worden gegenereerd. Dit maakt de boot wendbaarder en efficiënter, zeggen de onderzoekers.
In het water testen
Het team ontwikkelde ook een methode waarmee de boot zijn positie en oriëntatie sneller en nauwkeuriger kan volgen. Om dit te doen, ontwikkelden zij een efficiënte versie van een predictive control (NMPC) algoritme, dat over het algemeen wordt gebruikt om robots binnen verschillende beperkingen te besturen en te navigeren.
De NMPC en soortgelijke algoritmen zijn eerder gebruikt om autonome boten te besturen. Maar meestal worden die algoritmen alleen in de simulatie getest of houden ze geen rekening met de dynamiek van de boot. De onderzoekers verwerkten daarentegen de niet-lineaire wiskundige modellen die een paar bekende parameters bevatten, zoals het slepen van de boot, centrifugale krachten en Coriolis-krachten, en toegevoegde massa als gevolg van versnellen of vertragen in water. De onderzoekers gebruikten ook een identificatie-algoritme dat vervolgens onbekende parameters identificeert terwijl de boot op een pad wordt getraind.
Het is nog niet bekend wanneer de boten daadwerkelijk in Amsterdam zullen varen.
Door: Kelly Bakker
Bron: MIT