Onderwaterrobot verzamelt autonoom monsters op zeebodem
Het op afstand bedienen van onderwatervoertuigen met een joystick kan een hele klus zijn. Daarom ontwikkelden onderzoekers een onderwaterrobot die autonoom monsters van de oceaanbodem kan nemen.
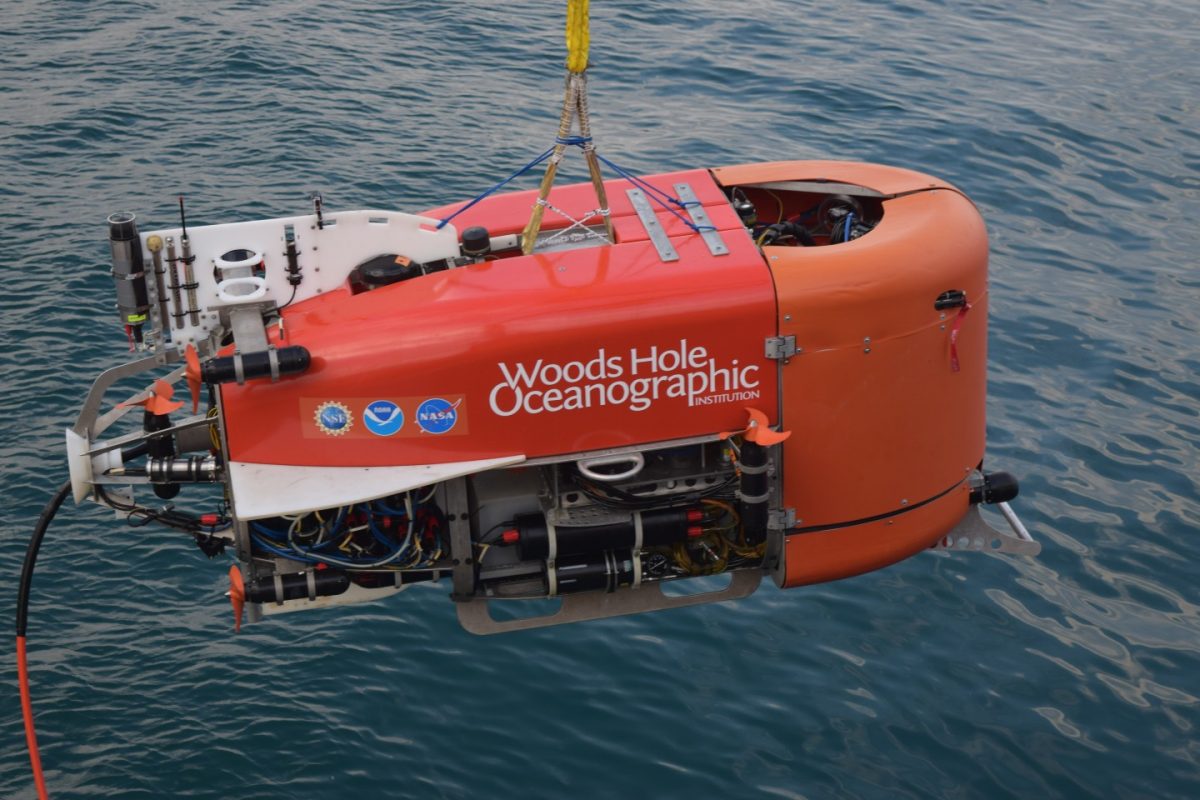
Hiertoe ontwikkelde een team van Woods Hole Oceanographic Institution (WHOI) onlangs geautomatiseerde planningssoftware op basis van kunstmatige intelligentie waarmee onderwatervoertuigen worden bestuurd. Recent werd de technologie gebruikt op een bestaand WHOI-vaartuig.
Toen het vaartuig de onderzeese vulkaan Kolumbo voor de kust van het Griekse eiland Santorini ging verkennen, kon het nieuwe systeem beslissen welke locaties het zou bezoeken om vervolgens monsters te nemen op de betreffende locaties. Vanuit de Universiteit van Michigan werd een commando gegeven om met een slang die aan de robotarm vastzit zeer nauwkeurig monsters te nemen. Het monsters laten nemen door een vaartuig zonder menselijke ingreep is een enorme stap voorwaarts.
Het systeem werd ontwikkeld door het Planetary Science and Technology from Analog Research programma van NASA. Het zou ooit ook kunnen worden ingezet om oceanen op andere planeten te verkennen. Voor die tijd werkt het team verder aan een interface die voldoende heeft aan gesproken taal zodat wetenschappers direct kunnen communiceren met autonome onderwaterrobots. Verder wordt ook gewerkt aan het laten samenwerken van verschillende onderwaterrobots als één gezamenlijke vloot.
Meer nieuws
NLR werkt samen met zepp.solutions aan brandstofcel voor waterstofvliegtuig

(productnews)
Lucht & Ruimtevaart / 31-12-2024
Lees meerNieuwe productiefaciliteit voor Dow Terneuzen

(productnews)
Algemeen / 30-12-2024
Lees meerPudu Robotics presenteert humanoïde robot PUDU D9

(productnews)
High tech / 30-12-2024
Lees meer‘Honda en Nissan overwegen fusie’
