Kennis van mieren leidt tot doorbraak in robotnavigatie
Hoe kunnen insecten zich zo ver van hun thuisbasis bewegen maar toch altijd hun weg terug vinden? Naast biologen, zijn nu ook onderzoekers gespecialiseerd in AI voor kleine autonome robots op zoek naar het antwoord. Drone-onderzoekers van de TU Delft lieten zich inspireren door biologisch onderzoek over hoe mieren hun omgeving visueel herkennen en hun stappen zorgvuldig tellen om zo veilig thuis te komen. Gewapend met dit inzicht creëerden ze een op insecten geïnspireerde autonome navigatiestrategie voor kleine, lichtgewicht robots. Met deze robotnavigatie komen deze robots na een lange tocht gewoon weer thuis. En dat met zeer weinig rekenkracht en geheugen (1,16 kilobyte per 100 m). In de toekomst zouden minuscule autonome robots kunnen worden ingezet voor een breed scala aan toepassingen.
Kleine robots, met een gewicht van tientallen tot een paar honderd gram, hebben talloze interessante praktische toepassingen. Door hun lichte gewicht zijn ze extreem veilig, zelfs als ze per ongeluk tegen iemand opbotsen. En dankzij hun geringe grootte, schuwen ze ook de kleine ruimte niet. Goedkoop geproduceerde robots zouden massaal kunnen worden ingezet om snel een groot gebied te bestrijken, bijvoorbeeld om vroegtijdig ongedierte of ziekten op te sporen in kassen. Autonomie is bij dit soort kleine robots echter geen sinecure, omdat ze in vergelijking met grotere robots over beperkte middelen beschikken. Een groot obstakel is dan ook robotnavigatie.
Externe infrastructuur
Dit soort kleine robots moet zelf kunnen navigeren om hun taken uit te voeren. Om dit probleem op te lossen, kunnen de robots hulp krijgen van externe infrastructuur. Zo kunnen ze buiten gebruik maken van GPS-satellieten of binnen van draadloze communicatiebakens. Het is echter vaak niet wenselijk om afhankelijk te zijn van dergelijke infrastructuur. Binnen heb je geen GPS, en in volgebouwde omgevingen zoals moderne steden tussen hoge gebouwen is het vaak onnauwkeurig. Het alternatief van het installeren en onderhouden van bakens is daarentegen vrij duur of simpelweg niet mogelijk, bijvoorbeeld bij reddingsoperaties.
Problemen met huidige technologie
De AI die doorgaans wordt gebruikt voor autonome navigatie met de sensoren en rekenkracht op de robot zelf is in principe ontworpen voor grote robots, zoals zelfrijdende auto’s. Deze aanpakken zijn gebaseerd op zware, energieslurpende sensoren zoals LiDAR-afstandsmeters. Deze technologie is niet geschikt voor kleine robots. Een andere optie is het gebruiken van een zeer energiezuinige zichtsensor die rijke informatie over de omgeving levert als basis voor zeer gedetailleerde 3D-kaarten. Hiervoor is echter veel rekenkracht en geheugen nodig, en de bijbehorende computerapparatuur is te groot en verbruikt te veel energie voor zulke kleine robots. Kleine drones kan je alleen uitrusten met zeer kleine processors met weinig rekenkracht en geheugen. Autonome robotnavigatie is daarmee een grote uitdaging, aangezien de huidige AI voor navigatie veel rekenkracht en geheugen vraagt.
Robotnavigatie door nabootsing van de natuur
Om deze uitdaging het hoofd te bieden, besloten onderzoekers van de TU Delft zich tot de natuur te wenden. Insecten zijn vooral interessant omdat ze zich met zeer beperkte sensor- en rekenkracht over afstanden verplaatsen die relevant zouden kunnen zijn voor veel praktische toepassingen. Biologen krijgen steeds meer inzicht in de strategieën van insecten. Zo leerden ze dat insecten hun eigen bewegingen bijhouden, ook wel odometrie genoemd. Ze combineren dit met visueel gestuurd gedrag op basis van herkenning van de omgeving.
Odometrie
Odometrie wordt steeds beter begrepen, zelfs tot op neuronaal niveau. Toch zijn de exacte mechanismen die ten grondslag liggen aan het visueel gestuurd gedrag nog niet helemaal boven water. Wel bestaan er meerdere concurrerende theorieën over hoe insecten zicht gebruiken om te navigeren. Een van de eerste theorieën gaat uit van een model gebaseerd op snapshots, ofwel visuele momentopnames. Volgens dit model maakt een mier bijvoorbeeld regelmatig momentopnames van zijn omgeving. Later, wanneer de mier weer ’dezelfde plek nadert, vergelijkt hij zijn huidige omgeving met de momentopname. Hij beweegt totdat de verschillen minimaal zijn. Hierdoor vindt de mier zijn weg terug naar een momentopname, ook wel homing genoemd. Tegelijkertijd wordt de onvermijdelijke positie-afwijking die gepaard gaat met odometrie tegengegaan.
Hans en Grietje
“Navigatie op basis van momentopnames kan je het best uitleggen aan de hand van het sprookje van Hans en Grietje. Toen Hans zijn weg nog uitstippelde met steentjes, vond hij altijd makkelijk de weg terug. Maar toen hij broodkruimels gebruikte, werden die direct opgegeten door vogels. Daardoor verdwaalden Hans en Grietje. Onze momentopnames zijn het beste te vergelijken met die steentjes,” legt onderzoeker Tom van Dijk uit. “Een momentopname werkt pas als de robot dichtbij genoeg is. Als de visuele omgeving te veel verschilt van de momentopname, kan de robot de verkeerde richting inslaan en mogelijk voor altijd verdwalen. Het is daarom zaak om voldoende momentopnames te maken. Als Hans maar één of twee steentjes had laten vallen, was het ook nooit gelukt om thuis te komen. Als je daarentegen teveel steentjes laat vallen, zit je binnen de kortste keren zonder steentjes. Bij een robot leggen al die momentopnames beslag op het al schaarse interne geheugen. Bij eerdere onderzoeken zaten de momentopnames doorgaans heel dicht bij elkaar, zodat de robot eerst visueel naar de ene momentopname navigeerde en daarna meteen naar het volgende – wat dus alsnog veel geheugen verbruikte.”
Momentopnames
“Het belangrijkste inzicht dat ten grondslag ligt aan onze strategie is dat je momentopnames veel verder uit elkaar kunt plaatsen, als de robot daartussen gebruik maakt van odometrie”, zegt Guido de Croon, hoogleraar bio-geïnspireerde drones. “Homing werkt zolang de robot dicht genoeg bij de locatie van de momentopname uitkomt. Dat wil zeggen: zolang de odometrische afwijking van de robot binnen de momentopname valt. Hierdoor kan de robot veel minder momentopnames maken. Daarnaast kan hij ook veel verder vliegen, omdat robots bij homing veel langzamer vliegen dan wanneer ze odometrie gebruiken om opeenvolgende momentopnames af te gaan.”
CrazyFlie
De voorgestelde op insecten geïnspireerde navigatiestrategie stelde een 56 gram wegende “CrazyFlie” drone, uitgerust met een omnidirectionele camera, in staat om afstanden tot 100 meter af te leggen met slechts 1,16 kB aan geheugen. Alle berekeningen werden gedaan op een piepkleine computer, een zogeheten “microcontroller”, die in veel goedkope elektronische apparaten te vinden is.
Robottechnologie in de praktijk
“De op insecten geïnspireerde robotnavigatie is een belangrijke stap richting het toepassen van kleine autonome robots in de praktijk”, zegt Guido de Croon. “Hoewel de strategie wel beperkter is dan de strategie van de allerlaatste navigatiemethoden. Zo wordt er geen kaart gegenereerd en kan de robot alleen terugkeren naar een bepaald startpunt. Toch kan dit voor veel toepassingen meer dan genoeg zijn, Om voorraden bij te houden in een magazijn of gewassen te monitoren in een kas, kunnen drones bijvoorbeeld wegvliegen, gegevens verzamelen en terugkeren naar het basisstation. Ze kunnen toepassingsgerichte beelden opslaan op een kleine SD-kaart, die daarna worden verwerkt door een server maar niet nodig zijn voor het navigeren zelf.”
Bron: TU Delft
Afbeelding van Tworkowsky via Pixabay
Lees ook: BionicBee kan autonoom in een zwerm vliegen
De Albacopter: een kruising tussen een multicopter en een zweefvliegtuig
Urban Air Mobility (UAM) opent nieuwe mogelijkheden op het gebied van goederenvervoer. Als een deel van het stedelijk verkeer de lucht in gaat, biedt het daarnaast compleet nieuwe benaderingen met betrekking tot duurzame mobiliteitsoplossingen. In het Fraunhofer Albacopter Lighthouse Project houden zes Fraunhofer instituten zich bezig met de technische en sociale aspecten van UAM. Onder leiding van het Fraunhofer Institute for Transportation and Infrastructure Systems IVI ontwikkelden onderzoekers een vliegtuig dat op een bijzonder efficiënte manier zweeft – geïnspireerd door de albatros.
Voor UAM gelden strenge eisen voor vliegtuig- en systeemtechnologie, waaronder veilige, stille VTOL-systemen (vertical take-off and landing/verticaal opstijgen en landen) die ook zeer krachtige aandrijfprestaties kunnen leveren wanneer ze zweven.
De uitdagingen van stedelijk luchttransport
Elektrische multicopters bieden de voordelen van verticaal opstijgen en landen terwijl ze ook voldoen aan veiligheids- en milieucriteria. Hun bereik en laadvermogen zijn echter uiterst beperkt door hun lage efficiëntie en lage energieopslagdichtheid. Grotere vleugels zouden de energiebalans van de vliegtuigen aanzienlijk kunnen verbeteren doordat ze langere tijd kunnen zweven. Aan de andere kant zouden deze vleugels het opstijgen en landen in stedelijke gebieden bemoeilijken. Om UAM financieel levensvatbaar te maken zijn bovendien vliegtuigen die verticaal opstijgen en landen nodig die ook autonoom kunnen vliegen. Hiervoor zijn echter AI-gebaseerde besturingssystemen nodig, die verdere veiligheidsrisico’s met zich meebrengen.
Het is te verwachten dat de UAM in de toekomst diverse toepassingen zal hebben. Denk aan toepassingsscenario’s op het gebied van logistieke drones, luchttaxi’s, reddings- en bewakingsdrones of in landbouwtechnologie.
Het Fraunhofer Albacopter project
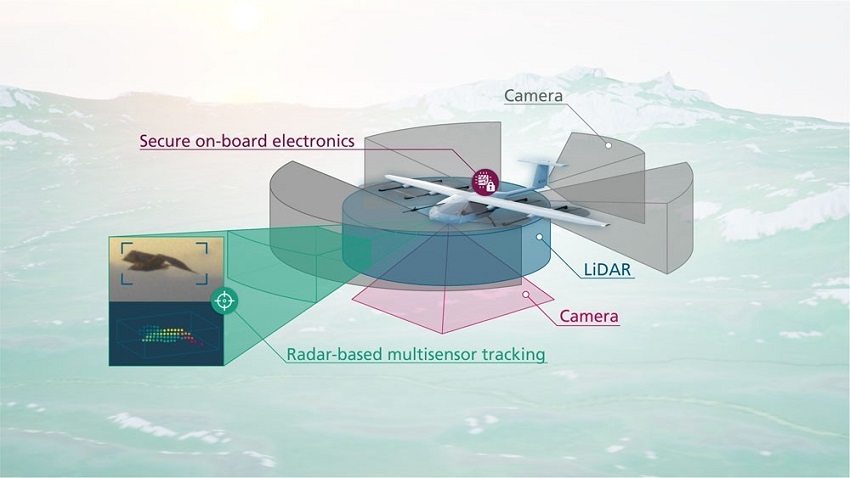
In 2021 startte Fraunhofer een project met als doel een vliegend platform te bouwen dat de wendbaarheid van een multicopter kan combineren met de efficiëntie van een zweefvliegtuig. “Met de Albacopter willen we een experimenteel vliegtuig ontwikkelen dat de wendbaarheid van een multicopter combineert met het vermogen van een albatros om lange afstanden te zweven met een minimaal gebruik van energie.” Dat zegt Prof. Matthias Klingner, projectmanager en directeur van Fraunhofer IVI. “Enkele uitzonderlijke kenmerken van dit experimentele zweefvliegtuig zijn onder andere drone-systemen en vrachtcontainers gemaakt van duurzame materialen. Daarnaast bevat het krachtige coaxiale voortstuwingssystemen, krachtige multi-sensor systemen voor het waarnemen van de omgeving en het monitoren van functionaliteiten, en veilige elektronische systemen, inclusief een AI-gebaseerde automatische piloot,” vervolgt hij. Het consortium heeft de complexiteit van dit drone-ontwerp aangepakt door de expertise van de deelnemende instituten te bundelen.
Materiaalkeuze
Het Fraunhofer Institute for Structural Durability and System Reliability LBF ontwierp de structuur en aerodynamische componenten van de Albacopter. Voor de structuur ontwikkelde het Fraunhofer Institute for Chemical Technology ICT pultrusieprofielen. Dat wil zeggen vezelversterkte thermoplasten die werden geïntegreerd in de romparchitectuur van het ruimteframe. Net als de transportcontainers, die zijn gemaakt van biopolymeer hardschuim, is het mogelijk deze systeemcomponenten eenvoudig te recyclen.
Aandrijving Albacopter
“Het efficiënte aandrijvingsontwerp van de Albacopter is gebaseerd op snelle synchrone motoren met meertrapsoverbrenging en hoge vermogensdichtheid,” legt Prof. Frank Henning, directeur van Fraunhofer ICT, uit. Het instituut levert niet alleen de nieuwe voortstuwingstechnologie. Het levert ook een speciale voortstuwingstestopstelling om het testen van eVTOL-voortstuwingssystemen in de vermogensklassen tot 450 kW onder realistische omstandigheden te vergemakkelijken.
Batterijopslagsysteem
“Het ontwerp van het batterijopslagsysteem in Albacopter is gebaseerd op cyclusbestendige secundaire cellen die zeer omkeerbare laad- en ontlaadprocessen garanderen. We hebben gedetailleerd onderzoek gedaan naar de degradatie van de cellen en mogelijke faalmechanismen,” legt prof. Tobias Melz, directeur van Fraunhofer LBF, uit.
Geavanceerde sensoren en artificiële intelligentie
Robuuste, lichte multi-sensorsystemen met hoge prestaties worden gecombineerd met gevoelige single-photon LiDAR-detectoren. Deze detectoren ontwikkelde het Fraunhofer Institute for Microelectronic Circuits and Systems IMS. Hierdoor wordt 360-graden omgevingsbewaking mogelijk. “De semantische 3D-reconstructie van de omgeving wordt vervolgens uitgevoerd op basis van betrouwbare AI-systemen. In combinatie met intelligente trajectplanning maakt dit innovatieve functies mogelijk zoals autonoom (nood)landen, een van de belangrijkste veiligheidsfuncties van de Albacopter.” Dat zegt Henri Meeß, manager van de Highly Automated Flying-groep bij Fraunhofer IVI.
Totaalsysteem
Samen met een faalveilige RISC-V boordnetwerkarchitectuur, continue monitoring, stabiele 5G-communicatie en een redundante automatische piloot resulteert dit in een totaalsysteem. Een systeem dat voldoet aan de hoge betrouwbaarheidseisen van de UAM. Ondergeschikt aan de automatische piloot is het modelgebaseerde vluchtstandregelsysteem van het Fraunhofer Institute for Mechatronics Design IEM. Dit systeem vertoont stabiel regelgedrag, vooral in de kritieke overgangsfasen tussen zweven en zweefvliegen.
Autonoom vanaf het begin
De Albacopter is bedoeld als demonstratiemodel voor Fraunhofer-technologieën. Naar verwachting zal de vraag hiernaar de komende vijf tot acht jaar sterk toenemen in de snelgroeiende luchtvaart- en logistieke sectoren. Als VTOL-zweefvliegtuig zal de Albacopter beschikbaar zijn voor het testen van verschillende technologieën.
Validatie
De onderzoekers valideren hun ontwerp in meerdere fasen met behulp van geschikte vluchtmodellen, windtunnel experimenten, Iron Bird testopstellingen en systeemsimulaties op een digital win ontwikkeld door het Fraunhofer Institute for Optronics, System Technologies and Image Exploitation IOSB. Een schaalversie van de drone met een spanwijdte van 7 meter en een laadvermogen van ongeveer 25 kilogram zal in de herfst van 2023 worden gelanceerd, terwijl uitgebreide vliegtesten van de Albacopter worden verwacht voor begin 2024.
Bron en openingsfoto: De Albacopter – een kruising tussen een multicopter en een zweefvliegtuig (foto: Fraunhofer IVI)
Lees ook: Eerste blauwdruk ontwikkeld voor vrachtdrone
Financiering voor onder meer EUV-straling, herwinning nutriënten en behandelmethoden van kanker
Twaalf vooraanstaande wetenschappers uit de wetenschapsdomeinen Toegepaste en Technische wetenschappen (TTW) en Gezondheidsonderzoek en Zorginnovatie (ZonMw) ontvangen een Vici-financiering van maximaal 1,5 miljoen euro. Hiermee kunnen de laureaten gedurende vijf jaar een vernieuwende onderzoekslijn ontwikkelen en een eigen onderzoeksgroep opbouwen. Vici is een van de grootste persoonsgebonden wetenschappelijke premies van Nederland en is gericht op gevorderde onderzoekers.
De wetenschappers gaan op verschillende gebieden onderzoek uitvoeren. Binnen de Vici zijn wetenschappers namelijk vrij om hun eigen onderzoeksproject voor te dragen voor financiering. Meerdere laureaten gaan zich bezighouden met verschillende vormen of behandelmethoden van kanker. Een project behelst bijvoorbeeld het verbeteren van de techniek van borstkankerscreening. Het doel is om gevonden tumoren nog beter te kunnen karakteriseren. Daarnaast spitst een onderzoek zich toe op darmkanker. Daarbij willen de onderzoekers celcompetitie in het vroegste stadium van kanker beter begrijpen en manipuleren om de ziekte te kunnen voorkomen. Ook zullen onderzoekers het ontstaan van darmkanker filmen om het te kunnen bestuderen. Hiermee kunnen ze factoren ontdekken die kunnen leiden tot verhoogde kans op darmkanker.
Extreem-ultraviolette nano-beeldvorming
Ander onderzoek gaat onder meer over microscopie met extreem-ultraviolet (EUV) straling. Dit zou een grote reeks nieuwe mogelijkheden opleveren in wetenschap en technologie. Maar huidige EUV-detectoren zijn traag, en niet geoptimaliseerd voor toepassingen met weinig licht. In dit project gaat een onderzoeker daarom een nieuwe manier van EUV-detectie voor beeldvorming ontwikkelen, om ervoor te zorgen dat elk foton telt.
Herwinning nutriënten
Nog een onderzoek dat financiering ontvangt richt zich op de herwinning van nutriënten. Nanoporeuze 2D- en 3D-materialen die interessante eigenschappen vertonen voor energieopslag kunnen ook worden ingezet om water efficiënt te ontzouten via elektrisch gedreven scheidingsprocessen. Het onderzoeksvoorstel is erop gericht om hier met behulp van fysisch-chemische modificaties selectiviteit aan toe tevoegen. Op die manier is het mogelijk de onderliggende mechanismen van selectiviteit fundamenteel te doorgronden. Met deze innovatieve aanpak kunnen zouten in pure vorm verkregen worden. Dat maakt hergebruik van metalen en nutriënten mogelijk.
Er is nog meer financiering toegekend. Andere onderzoeksvragen gaan bijvoorbeeld over nu nog ongrijpbare plaagvorming in de landbouw voorspelbaar maken en over overdracht van virussen via de lucht.
Aangepaste planning
NWO kent de Vici jaarlijks toe. Bij de wetenschapsdomeinen TTW en ZonMw zijn in totaal 91 aanvragen ingediend, waarvan 12 gehonoreerd. Deze toekenningen betreffen Vici-ronde 2021-deel 1. De toekenningen van de Vici van de wetenschapsdomeinen Exacte en Natuurwetenschappen (ENW) en Sociale en Geesteswetenschappen (SGW) gebeurt naar verwachting half maart. Door uitval en ziekteverzuim door corona duurt de beoordeling langer dan voorzien. Om niet alle wetenschappers nog langer in spanning te laten, zijn daarom de toekenningen van TTW en ZonMw nu alvast bekend gemaakt. Als alle toekenningen bekend zijn, volgen alle cijfers, feiten en honoreringspercentages rondom deze ronde.
NWO-Vici financiering
De Vici-financiering maakt samen met de Veni- en Vidi-beurzen deel uit van het NWO-Talentprogramma. Vici is gericht op senior-onderzoekers die hebben aangetoond met succes een eigen vernieuwende onderzoekslijn tot ontwikkeling te kunnen brengen. Ze hebben daarbij jonge onderzoekers begeleid. Onderzoekers die een Vici-subsidie krijgen toegekend mogen een eigen onderzoeksgroep opbouwen, vaak vooruitlopend op een structurele hoogleraarspositie.
Afbeelding van mohamed Hassan via Pixabay